1第12节 平面等距变换
1.1 引言
📜 [原文1]
考虑欧几里得平面 $\mathbb{R}^{2}$。$\mathbb{R}^{2}$上的等距变换是一个置换 $\phi: \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}$,它保持距离,使得对于 $\mathbb{R}^{2}$ 中的所有点 $P$ 和 $Q$,点 $P$ 和 $Q$ 之间的距离与点 $\phi(P)$ 和 $\phi(Q)$ 之间的距离相同。如果 $\psi$ 也是 $\mathbb{R}^{2}$ 上的一个等距变换,那么 $\psi(\phi(P))$ 和 $\psi(\phi(Q))$ 之间的距离必须与 $\phi(P)$ 和 $\phi(Q)$ 之间的距离相同,而后者又等于 $P$ 和 $Q$ 之间的距离,这表明两个等距变换的复合仍然是一个等距变换。由于恒等映射是等距变换,并且等距变换的逆也是等距变换,我们看到 $\mathbb{R}^{2}$ 上的等距变换构成了 $\mathbb{R}^{2}$ 上所有置换群的一个子群。
这段话定义了本节的核心概念:平面等距变换,并阐述了这些变换在群论框架下的性质。
- 起点:欧几里得平面
- 首先,我们将舞台设定在欧几里得平面 $\mathbb{R}^2$ 上。这是我们熟悉的二维笛卡尔坐标系,由无数个点 $(x, y)$ 组成,其中 $x$ 和 $y$ 都是实数。这个平面的关键特性是我们可以测量任意两点之间的距离(即欧几里得距离)。
- 核心定义:等距变换
- 等距变换 (Isometry) 是一种特殊的函数或映射,记作 $\phi$。这个函数的作用是“移动”平面上的每一个点。
- 它是一个置换 $\phi: \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}$。这里的“置换”一词在几何背景下,意味着它是一个双射(bijection),即一一对应的映射。这意味着:
- 单射(Injective):平面上没有两个不同的点会被 $\phi$ 映射到同一个点。
- 满射(Surjective):平面上的每一个点都能被某个点通过 $\phi$ 映射得到。
- 简单来说,$\phi$ 对整个平面进行了一次“重新排列”,不丢失任何点,也不创造新的点,更不会把两个点合并成一个。
- 最关键的性质是“保持距离”。假设 $P$ 和 $Q$ 是平面上的任意两个点,它们之间的距离是 $d(P, Q)$。经过等距变换 $\phi$ 后,这两个点被移动到了新的位置 $\phi(P)$ 和 $\phi(Q)$。这两个新点之间的距离 $d(\phi(P), \phi(Q))$ 必须与原来两点间的距离完全相等,即 $d(P, Q) = d(\phi(P), \phi(Q))$。
- 因为等距变换保持距离,所以它也保持了图形的形状和大小。一个三角形变换后还是一个全等的三角形。这就是为什么等距变换也被称为“刚体运动”。
- 群的性质:封闭性、单位元、逆元
- 复合(封闭性):如果我们先对平面做一个等距变换 $\phi$,然后再做一个等距变换 $\psi$,会发生什么?这个过程称为复合,记作 $\psi \circ \phi$。原文论证了这种复合操作的结果仍然是一个等距变换。
- $\phi$ 保持距离:$d(P, Q) = d(\phi(P), \phi(Q))$。
- $\psi$ 也保持距离:$d(\phi(P), \phi(Q)) = d(\psi(\phi(P)), \psi(\phi(Q)))$。
- 因此,通过传递性,$d(P, Q) = d(\psi(\phi(P)), \psi(\phi(Q)))$。这意味着复合变换 $\psi \circ \phi$ 也保持距离,所以它也是一个等距变换。这证明了等距变换的集合在复合运算下是封闭的。
- 恒等映射(单位元):恒等映射是指将每个点都映射到其自身的变换,即 $I(P) = P$。这个变换显然保持距离,因为 $d(P, Q) = d(I(P), I(Q))$。所以恒等映射是一个等距变换,它扮演了群中单位元的角色。
- 逆变换(逆元):因为等距变换 $\phi$ 是一个双射,所以它一定存在一个逆映射 $\phi^{-1}$,可以将变换后的点“送回”原来的位置。如果 $\phi$ 保持距离,那么它的逆变换 $\phi^{-1}$ 也必然保持距离。因此,每个等距变换都有一个对应的逆变换,这个逆变换也是一个等距变换。这满足了群中逆元存在的条件。
- 结论:等距变换群
- 一个集合配上一个运算,如果满足封闭性、结合律(函数复合天然满足)、存在单位元和逆元,那么它就构成一个群。
- 我们已经验证了所有平面等距变换的集合,在函数复合运算下,满足了这些条件。
- 因此,所有平面等距变换构成一个群,称为平面等距变换群或欧几里得群 $E(2)$。
- 这个群是 $\mathbb{R}^2$ 上所有置换(即所有双射)构成的更大群的一个子群,因为等距变换只是众多置换中满足“保持距离”这一额外条件的一小部分。
- $\mathbb{R}^{2}$:
- $\mathbb{R}$ 代表实数集。
- 上标 $2$ 表示这是一个二维空间。
- $\mathbb{R}^{2}$ 指的就是所有形如 $(x, y)$ 的有序实数对的集合,即我们熟悉的二维笛卡尔平面。
- $\phi: \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}$:
- $\phi$ 是一个函数的名称,这里代表一个等距变换。
- $: \mathbb{R}^{2} \rightarrow \mathbb{R}^{2}$ 描述了这个函数的定义域和到达域。它接收一个 $\mathbb{R}^{2}$ 中的点作为输入,并输出一个 $\mathbb{R}^{2}$ 中的点作为结果。
- $d(P, Q)$:
- 这是一个表示距离的函数。如果 $P = (x_1, y_1)$ 且 $Q = (x_2, y_2)$,那么欧几里得距离 $d(P, Q) = \sqrt{(x_1-x_2)^2 + (y_1-y_2)^2}$。
- $d(P, Q) = d(\phi(P), \phi(Q))$:
- 这是等距变换的核心定义。
- 左边是原始点 $P$ 和 $Q$ 之间的距离。
- 右边是经过变换后的新点 $\phi(P)$ 和 $\phi(Q)$ 之间的距离。
- 等号表明这两个距离相等。
- $\psi(\phi(P))$:
- 这是函数复合的表示法,通常写作 $(\psi \circ \phi)(P)$。
- 它表示先对点 $P$ 应用变换 $\phi$,得到一个新点 $\phi(P)$,然后再对这个新点应用变换 $\psi$。
- 示例1:平移变换
- 假设有一个平移变换 $\phi(x, y) = (x+3, y-1)$。
- 我们取两个点 $P = (1, 2)$ 和 $Q = (4, 6)$。
- 原始距离:$d(P, Q) = \sqrt{(4-1)^2 + (6-2)^2} = \sqrt{3^2 + 4^2} = \sqrt{9 + 16} = \sqrt{25} = 5$。
- 现在应用变换:
- $\phi(P) = \phi(1, 2) = (1+3, 2-1) = (4, 1)$。
- $\phi(Q) = \phi(4, 6) = (4+3, 6-1) = (7, 5)$。
- 变换后距离:$d(\phi(P), \phi(Q)) = \sqrt{(7-4)^2 + (5-1)^2} = \sqrt{3^2 + 4^2} = \sqrt{9 + 16} = \sqrt{25} = 5$。
- 因为 $d(P, Q) = d(\phi(P), \phi(Q)) = 5$,所以这个平移变换是一个等距变换。
- 示例2:非等距变换
- 考虑一个缩放变换 $\psi(x, y) = (2x, 2y)$。
- 我们用同样的点 $P = (1, 2)$ 和 $Q = (4, 6)$。原始距离是 $5$。
- 应用变换:
- $\psi(P) = \psi(1, 2) = (2 \cdot 1, 2 \cdot 2) = (2, 4)$。
- $\psi(Q) = \psi(4, 6) = (2 \cdot 4, 2 \cdot 6) = (8, 12)$。
- 变换后距离:$d(\psi(P), \psi(Q)) = \sqrt{(8-2)^2 + (12-4)^2} = \sqrt{6^2 + 8^2} = \sqrt{36 + 64} = \sqrt{100} = 10$。
- 这里的变换后距离 (10) 是原始距离 (5) 的两倍。因为距离没有保持不变,所以这个缩放变换不是一个等距变换。
- 等距变换 vs 相似变换:等距变换是相似变换(Similarity Transformation)的一种特例。相似变换只要求保持形状,可以改变大小(即所有距离都按相同比例缩放)。等距变换要求缩放比例必须为1。
- 置换的含义:在组合数学中,置换通常指有限集合上的双射。在这里,作者将其推广到无限集合(整个平面),意指平面到自身的双射。不要局限于有限集的概念。
- 恒等变换:这是一个平凡但重要的等距变换。它是群的单位元,任何变换与它复合都等于那个变换本身。
- 群的运算是函数复合:要记住等距变换群中的“乘法”运算是函数的复合,而不是数的乘法。函数复合一般是不可交换的,即 $\phi \circ \psi$ 不一定等于 $\psi \circ \phi$。因此,等距变换群通常是非阿贝尔群。
本段定义了平面等距变换,它是一种移动平面上所有点且保持任意两点间距离不变的特殊函数。通过验证封闭性(复合仍为等距变换)、存在单位元(恒等变换)和逆元(每个等距变换都有逆),证明了所有平面等距变换的集合在函数复合运算下构成一个群。
本段的目的是建立研究对称性的数学基础。通过将几何中的“刚体运动”抽象为代数中的“群”结构,我们可以运用强大的群论工具来分析和分类几何图形的对称性。这是从直观的几何概念向抽象代数结构过渡的关键一步。
想象你有一张印有图案的透明塑料片,放在一张白纸上。
- 一个等距变换就是你移动这张塑料片的任何一种方式,只要这张塑料片本身不被拉伸、压缩或撕裂。
- 你可以将它平移(向上下左右滑动),这叫平移。
- 你可以绕着一个点旋转它,这叫旋转。
- 你可以把它翻过来,这叫反射。
- 将塑料片移动后,塑料片上任意两个点A和B之间的距离,和你用尺子在移动前测量的距离是一模一样的。
- 等距变换群就是所有这些可能的“刚性移动”的集合。
想象整个二维平面是一块无限大的、绝对刚性的玻璃。一个等距变换就像是抓住这整块玻璃,然后移动它。你可以把它整个向东平移10公里,也可以绕着某个点(比如你站立的位置)旋转30度。因为玻璃是刚性的,所以玻璃上任意两个刻痕之间的距离在移动前后都不会改变。所有这些可能的移动方式的集合,就构成了等-距变换群。
1.2 对称群
📜 [原文2]
给定 $\mathbb{R}^{2}$ 的任意子集 $S$,将 $S$ 映射到其自身的 $\mathbb{R}^{2}$ 上的等距变换构成了等距变换群的一个子群。这个子群是 $S$ 在 $\mathbb{R}^{2}$ 中的对称群。在第8节中,我们给出了等边三角形对称群和正方形对称群在 $\mathbb{R}^{2}$ 中的群表。
这段话将等距变换的概念与特定图形的对称性联系起来,定义了核心概念——对称群。
- 从整个平面到特定图形:
- 上一段讨论的是作用于整个平面的等距变换。现在,我们将注意力集中在一个特定的图形上,这个图形是平面 $\mathbb{R}^2$ 的一个子集 $S$。这个 $S$ 可以是一个三角形、一个正方形、一个圆,甚至是一串字母。
- 对称操作的定义:
- 我们寻找这样一种等距变换 $\phi$:当它作用于整个平面时,图形 $S$ 上的所有点经过变换后,仍然落在图形 $S$ 的范围内。换句话说,变换后的图形 $\phi(S)$ 和原来的图形 $S$ 完全重合,即 $\phi(S) = S$。
- 这样的等距变换 $\phi$ 被称为图形 $S$ 的一个对称操作或对称。它是一种让图形“看起来没变”的刚体运动。
- 对称群的构成:
- 我们把一个图形 $S$ 的所有对称操作收集起来,形成一个集合。这个集合是所有平面等距变换集合的一个子集。
- 原文断言,这个对称操作的集合本身也构成一个群。为什么呢?我们需要验证它满足子群的条件:
- 封闭性:如果 $\phi_1$ 和 $\phi_2$ 都是 $S$ 的对称操作,即 $\phi_1(S) = S$ 和 $\phi_2(S) = S$。那么它们的复合 $\phi_2 \circ \phi_1$ 作用于 $S$ 的结果是 $\phi_2(\phi_1(S)) = \phi_2(S) = S$。所以复合操作也是 $S$ 的一个对称操作。封闭性满足。
- 单位元:恒等变换 $I$ 总是存在的,$I(S) = S$,所以它一定是任何图形 $S$ 的一个对称操作。
- 逆元:如果 $\phi$ 是一个对称操作,$\phi(S) = S$。对这个等式两边同时应用 $\phi^{-1}$,得到 $\phi^{-1}(\phi(S)) = \phi^{-1}(S)$。左边是 $I(S) = S$,所以我们有 $S = \phi^{-1}(S)$。这意味着 $\phi$ 的逆变换 $\phi^{-1}$ 也是 $S$ 的一个对称操作。逆元存在。
- 既然这个集合对复合运算封闭,且包含单位元和每个元素的逆元,那么它就是平面等距变换群的一个子群。
- 对称群的命名:
- 这个由图形 $S$ 的所有对称操作构成的子群,就被正式命名为“$S$ 的对称群”。它用代数结构精确地描述了一个几何图形的全部对称性。
- 回顾与联系:
- 作者提到,在之前的第8节中已经具体研究过两个例子:等边三角形的对称群(即二面体群 $D_3$)和正方形的对称群(即二面体群 $D_4$),并给出了它们的群表(类似于乘法表,显示了所有元素复合的结果)。这旨在唤起读者的记忆,将抽象定义与具体实例联系起来。
- 示例1:正方形的对称群
- 考虑一个顶点为 $P_1(1, 1), P_2(-1, 1), P_3(-1, -1), P_4(1, -1)$ 的正方形 $S$。它的中心在原点 $(0, 0)$。
- 对称操作1:旋转90度
- 令 $\rho$ 为绕原点逆时针旋转 $90^\circ$ 的变换,其公式为 $\rho(x, y) = (-y, x)$。
- 我们看看它如何作用于正方形的顶点:
- $\rho(P_1) = \rho(1, 1) = (-1, 1) = P_2$
- $\rho(P_2) = \rho(-1, 1) = (-1, -1) = P_3$
- $\rho(P_3) = \rho(-1, -1) = (1, -1) = P_4$
- $\rho(P_4) = \rho(1, -1) = (1, 1) = P_1$
- 这个旋转只是将顶点进行了轮换,整个正方形占据的空间和原来完全一样。所以 $\rho$ 是正方形 $S$ 的一个对称操作。
- 对称操作2:水平翻转
- 令 $\mu$ 为关于 $y$ 轴的反射,其公式为 $\mu(x, y) = (-x, y)$。
- 我们看看它如何作用于正方形的顶点:
- $\mu(P_1) = \mu(1, 1) = (-1, 1) = P_2$
- $\mu(P_2) = \mu(-1, 1) = (1, 1) = P_1$
- $\mu(P_3) = \mu(-1, -1) = (1, -1) = P_4$
- $\mu(P_4) = \mu(1, -1) = (-1, -1) = P_3$
- 这个反射交换了左右两边的顶点,正方形整体看起来也没变。所以 $\mu$ 也是一个对称操作。
- 正方形的对称群(即 $D_4$)包含了8个这样的操作:4个旋转(0, 90, 180, 270度)和4个翻转(水平、垂直、两条对角线)。
- 示例2:不对称图形
- 考虑一个由点 $A(1, 2), B(3, 5), C(6, 1)$ 构成的不规则三角形 $S'$。
- 除了恒等变换(即不动)之外,你找不到任何其他的平移、旋转或反射能让这个三角形变换后还和自身完全重合。
- 因此,这个不规则三角形的对称群只有一个元素:恒等变换。这是一个1阶的平凡群。
- 对称群是针对特定图形的:平面等距变换群是包含所有可能刚体运动的“宇宙群”,而一个图形的对称群是这个大群中能使该特定图形保持不变的一个很小的子群。
- 变换的是整个平面:严格来说,一个对称操作是作用于整个平面的,只不过我们特别关注它对图形 $S$ 的影响。当我们将正方形旋转90度时,平面上的所有点都旋转了90度,而不仅仅是正方形本身。
- 群的大小:图形的对称性越高,其对称群的阶(元素个数)就越大。一个圆有无限个对称操作(绕圆心旋转任意角度,沿任意直径反射),所以它的对称群是无限群。一个不规则图形的对称群可能只有1个元素。
本段定义了“图形的对称群”,即所有能使该图形保持不变的平面等距变换所构成的群。这个群是平面等距变换群的一个子群,其结构和大小精确地量化了图形的对称性程度。
此段的目的是将上一段定义的泛型等距变换群具体化,将其应用到对特定几何对象的分析中。这是从一般理论到具体应用的关键一步,为后面分析不同类型图形的对称性(如带状图案和壁纸图案)铺平了道路。
想象你有一块特定形状的饼干(比如一个星形饼干)和一个与之完全匹配的模具。
- 一个对称操作就是你拿起饼干,对它进行一次刚性运动(平移、旋转、翻转),然后发现它还能完美地放回模具里。
- 饼干的对称群就是所有能让它“回模”的操作的集合。
- 对于一个圆形饼干,你可以任意旋转它,它总能放回圆形模具,所以它有很多对称操作。
- 对于一个不规则的姜饼人饼干,你可能只有一种方式能把它放回模具(即不动它),所以它的对称性很低。
站在一个巨大的、画着一个完美正方形的广场中央。你闭上眼睛,你的朋友对整个广场(包括你和正方形)进行了一次等距变换。你睁开眼睛,如果发现那个正方形还在原来的位置,边缘、顶点都完全重合,那么你的朋友施展的就是这个正方形的一个对称操作。例如,他可能将整个广场绕中心旋转了180度,或者沿着一条对角线对整个空间做了一次镜像。所有这些让你“无法分辨”广场是否被动过的操作,集合起来就是正方形的对称群。
1.3 对高维空间的推广
📜 [原文3]
我们前面两段中定义的所有内容,对于 $n$ 维欧几里得空间 $\mathbb{R}^{n}$ 也同样适用,但我们在这里主要关注平面等距变换。
这是一个简短的过渡段落,旨在说明前面概念的普适性,并同时明确本节的讨论范围。
- 概念的普适性:
- 作者指出,等距变换和对称群的定义并不局限于二维平面。
- 我们可以将这些概念直接推广到 $n$ 维欧几里得空间 $\mathbb{R}^n$。
- 在 $\mathbb{R}^n$ 中,一个点由 $n$ 个坐标 $(x_1, x_2, \ldots, x_n)$ 表示。
- 两点间的距离公式变为 $d(P, Q) = \sqrt{(p_1-q_1)^2 + (p_2-q_2)^2 + \ldots + (p_n-q_n)^2}$。
- $\mathbb{R}^n$ 上的等距变换就是一个保持这个 $n$ 维距离不变的双射 $\phi: \mathbb{R}^n \rightarrow \mathbb{R}^n$。
- 同样,$\mathbb{R}^n$ 中所有等距变换也构成一个群 $E(n)$。
- 对于 $\mathbb{R}^n$ 中的任何一个子集(一个 $n$ 维物体),其对称群就是 $E(n)$ 中所有使该物体保持不变的变换构成的子群。
- 明确讨论范围:
- 尽管这些概念可以推广到任意维度,但作者明确表示,本节的焦点将集中在二维情况,即平面等距变换上。
- 这是为了简化问题,使讨论更具体、更直观,因为我们更容易在二维平面上想象和描绘这些变换。三维及更高维度的等距变换会变得更加复杂(例如,三维空间中的旋转需要一个旋转轴,而不仅仅是一个旋转中心)。
- 示例:三维空间中的等距变换
- 考虑三维空间 $\mathbb{R}^3$。
- 一个平移变换 $\tau(x, y, z) = (x+a, y+b, z+c)$ 显然是等距变换。
- 一个绕 $z$ 轴旋转 $\theta$ 度的变换 $\rho(x, y, z) = (x \cos\theta - y \sin\theta, x \sin\theta + y \cos\theta, z)$ 也是等距变换。
- 一个关于 $xy$ 平面(即 $z=0$ 的平面)的反射 $\mu(x, y, z) = (x, y, -z)$ 也是等距变换。
- 我们可以讨论一个正方体、一个球体或一个四面体的对称群。例如,正方体的对称群包含了48个元素。
- 不要误以为高维空间只是坐标数量的增加。维度的增加会带来质的变化。例如,在二维平面,旋转是绕一个点进行的;在三维空间,旋转是绕一条直线(轴)进行的;在四维空间,旋转是绕一个平面进行的。这使得高维度的等距变换分类变得更加困难。
本段起到了承上启下的作用。它告诉我们前面建立的关于等距变换和对称群的理论框架具有广泛的适用性,可以推广到任意维度的空间。同时,它也为读者设定了预期,即接下来的内容将聚焦于我们最熟悉的二维平面。
此段的目的是为了体现数学理论的普遍性和优雅性,说明所学知识并非孤立的技巧,而是更宏大理论体系的一部分。同时,通过将范围限定在二维,作者可以更深入、更具体地探讨等距变换的分类和结构,而不必陷入高维空间复杂的细节中。
这就像在学习物理时,我们先在理想情况下(如无摩擦、无空气阻力的真空)研究牛顿定律。这些定律其实在更复杂的现实世界中也适用(需要考虑摩擦力等因素),但从简单情况入手有助于我们掌握核心思想。这里,二维平面就是那个“理想情况”,而 $n$ 维空间就是更普适但更复杂的“现实世界”。
想象你正在学习如何驾驶。教练首先会让你在一个广阔、空无一物的二维停车场里练习,熟悉油门、刹车和方向盘。这对应于研究 $\mathbb{R}^2$ 中的等距变换。教练告诉你,你在这里学到的驾驶原理(如“打方向盘车会转弯”)在三维的真实道路上(有上下坡)也完全适用。但为了不让你一开始就手忙脚乱,我们先专注在平地上把基本功练好。
2平面等距变换的四种类型
2.1 分类介绍
📜 [原文4]
可以证明,平面上的每个等距变换都只有四种类型(参见Artin [5])。我们将列出这些类型,并为每种类型展示一个带标记的图形,该图形可以通过该类型的等距变换映射到自身。在图12.1、12.3和12.4中,带尖刺的线被认为是向左和向右无限延伸的。我们还以坐标形式给出了每种类型的一个示例。
这段是引言,预告了接下来将要介绍的内容:平面等距变换的完整分类。
- 核心论断:
- 作者提出了一个非常强有力的结论:“平面上的每个等距变换都只有四种类型”。这意味着任何一个你能想到的、保持平面距离不变的刚体运动,都必然是这四种类型中的一种(或者恒等变换)。
- 这是一个数学定理,其证明比较复杂,作者在此选择直接引用("参见Artin [5]"),而不展开证明。这在教科书中很常见,目的是让读者先掌握结论和应用。
- 内容预告:
- 接下来,作者将逐一介绍这四种类型。
- 为了帮助理解,每种类型都会配上一个插图。插图中的图形被设计成在该种类型的等距变换下保持不变,从而直观地展示了该变换的特性。
- 作者特别说明了图12.1、12.3和12.4中带箭头的线是无限延伸的,这是为了强调这些变换(如平移)作用在整个无限平面上。
- 除了图形,每种类型还会提供一个具体的坐标变换公式作为示例,这有助于从代数角度精确理解变换的规则。
本段作为一个引子,宣布了平面等距变换可以被完全分类为四种基本类型。它设定了接下来的学习目标:了解这四种类型是什么,它们在几何上如何表现(通过图形),以及在代数上如何表示(通过坐标公式)。
分类是数学研究中的一个基本而强大的思想。通过将无限多的等距变换归结为有限的几种类型,我们可以对等距变换群的结构有更清晰、更有条理的认识。这为后续分析更复杂的对称群(如带状群和壁纸群)提供了基础构建模块。
这就像一个生物学家告诉你,地球上数百万种动物,根据其基本身体结构,可以被分为几个大的门类(如脊椎动物、节肢动物、软体动物等)。本段就是告诉你,所有平面上的“刚体运动”,也可以被清晰地分为四个“门类”。我们接下来的任务就是学习这四个门类的特征。
想象你拿到一本关于所有平面“动作”的百科全书。这一段就是书的前言,它告诉你:“好消息!虽然看起来有无穷无尽的动作,但经过数学家的整理,我们发现它们其实只有四种基本模式。接下来我将为你一一揭晓,并配上图片和公式。”
2.2 类型一:平移 (Translation)
📜 [原文5]
平移 $\tau$:将每个点沿同一方向平移相同距离。参见图12.1。(示例:$\tau(x, y)=(x, y)+(2,-3)=(x+2, y-3)$。)
- 定义:平移是最简单的一种等距变换。它的特点是平面上的每一个点都朝着同一个方向移动了完全相同的距离。就像把一张纸在桌面上滑动,纸上的所有点都经历了相同的位移。
- 符号:通常用希腊字母 $\tau$ (tau) 来表示平移。
- 几何图像:图12.1展示了一条带有重复图案的无限长带子。这个带子在向右(或向左)平移一个单位图案的距离后,看起来和原来一模一样。这表明该平移是这个带状图案的一个对称操作。图中的小箭头从一个图案指向下一个相同的图案,直观地表示了平移的向量。
- 代数表示:
- 示例 $\tau(x, y)=(x, y)+(2,-3)=(x+2, y-3)$ 极好地诠释了平移。
- 一个点 $(x, y)$ 经过变换 $\tau$ 后,它的新坐标是原坐标加上一个固定的平移向量 $(2, -3)$。
- 这意味着 $x$ 坐标增加了2(向右移动2个单位),$y$ 坐标减少了3(向下移动3个单位)。
- 这个向量 $(2, -3)$ 对平面上所有的点都是一样的,体现了“同一方向,相同距离”的特性。
- $\tau(x, y)=(x+a, y+b)$:这是平移的一般代数形式。
- $\tau$:平移变换的名称。
- $(x, y)$:平面上任意一点的坐标。
- $(a, b)$:平移向量。$a$ 表示水平方向的移动,$b$ 表示垂直方向的移动。
- $(x+a, y+b)$:点 $(x, y)$ 经过平移后的新坐标。
- 在原文的例子中,平移向量是 $(2, -3)$。
- 示例1:使用原文的例子 $\tau(x, y) = (x+2, y-3)$。
- 让点 $P = (5, 8)$。变换后为 $\tau(P) = (5+2, 8-3) = (7, 5)$。
- 让点 $Q = (0, 0)$。变换后为 $\tau(Q) = (0+2, 0-3) = (2, -3)$。
- 可以看到,点 $P$ 和点 $Q$ 都被移动了相同的向量 $(2, -3)$。
- 示例2:考虑一个将所有点向左平移4个单位,向上平移1个单位的变换。
- 其平移向量为 $(-4, 1)$。
- 变换公式为 $\tau(x, y) = (x-4, y+1)$。
- 如果应用在一个三角形的顶点上,如 $A(1,1), B(3,1), C(1,4)$。
- 变换后的顶点为 $A'(-3,2), B'(-1,2), C'(-3,5)$。
- 新三角形 $A'B'C'$ 与原三角形 $ABC$ 全等,只是位置不同。
- 零平移:当平移向量是 $(0, 0)$ 时,变换为 $\tau(x, y) = (x, y)$,这就是恒等变换。所以恒等变换可以看作是一种特殊的平移。
- 平移没有不动点:只要平移向量不是 $(0, 0)$,那么平面上没有任何一个点会留在原来的位置。即,对于非平凡平移 $\tau$,不存在点 $P$ 使得 $\tau(P) = P$。
平移是一种将平面上所有点沿同一固定向量移动的等距变换。它在代数上表现为坐标的加法,在几何上表现为整体的滑动。除非是恒等变换,否则平移没有不动点。
平移是四种基本等距变换中最简单的一种,它构成了许多周期性图案(如带状图案和壁纸图案)对称群的基础。理解平移是理解这些无限群的关键。
想象你在一个巨大的冰面上,你和冰面上所有的物体都穿着溜冰鞋。一阵风吹来,把所有东西(包括你)都向同一个方向吹了相同的距离。这就是一次平移。你的相对位置、你和朋友间的距离都没有变,只是大家集体换了个地方。
看着电脑屏幕上的一个窗口,你用鼠标拖动它,但没有改变它的大小。窗口从屏幕左上角移动到右下角的过程,就是对这个窗口图形的一次平移。窗口上的每个像素点都经历了完全相同的位移。
2.3 类型二:旋转 (Rotation)
📜 [原文6]
旋转 $\rho$:将平面绕点 $P$ 旋转角度 $\theta$。参见图12.2。(示例:$\rho(x, y)=(-y, x)$ 是绕原点 $(0,0)$ 逆时针旋转 $90^{\circ}$ 的旋转。)
- 定义:旋转是另一种常见的等距变换。它由两个关键要素定义:
- 一个旋转中心 $P$:这是平面上唯一一个在旋转过程中保持不动的点。
- 一个旋转角度 $\theta$:这决定了平面上的点绕中心 $P$ 转了多少度。通常规定逆时针为正方向。
- 符号:通常用希腊字母 $\rho$ (rho) 来表示旋转。
- 几何图像:图12.2展示了一个风车或飞镖盘的形状。这个图形绕其中心点旋转一定角度(例如 $90^\circ$, $120^\circ$ 等)后,可以与自身重合。中心点就是旋转中心 $P$。图中的弯曲箭头形象地表示了旋转的动作。
- 代数表示:
- 原文的例子 $\rho(x, y) = (-y, x)$ 是一个非常重要和常见的旋转。
- 让我们验证一下它确实是绕原点 $(0,0)$ 逆时针旋转 $90^\circ$。
- 取点 $A=(1, 0)$,在 $x$ 轴正半轴上。变换后 $\rho(A) = (0, 1)$,跑到了 $y$ 轴正半轴上。
- 取点 $B=(0, 1)$,在 $y$ 轴正半轴上。变换后 $\rho(B) = (-1, 0)$,跑到了 $x$ 轴负半轴上。
- 这确实符合逆时针旋转 $90^\circ$ 的行为。
- 更一般的,绕原点逆时针旋转 $\theta$ 的公式是 $\rho(x, y) = (x\cos\theta - y\sin\theta, x\sin\theta + y\cos\theta)$。当 $\theta = 90^\circ$ 时,$\cos 90^\circ=0, \sin 90^\circ=1$,代入公式即得 $(x\cdot 0 - y\cdot 1, x\cdot 1 + y\cdot 0) = (-y, x)$。
- $\rho(x, y) = (-y, x)$:
- $\rho$:旋转变换的名称。
- $(x, y)$:输入点的坐标。
- $(-y, x)$:输出点的新坐标。新 $x$ 坐标是旧 $y$ 坐标的相反数,新 $y$ 坐标是旧 $x$ 坐标。
- 示例1:使用原文的例子 $\rho(x, y) = (-y, x)$。
- 让点 $P=(3, 2)$。变换后为 $\rho(P) = (-2, 3)$。
- 我们来检查距离是否保持不变。到原点的距离:
- $d(O, P) = \sqrt{3^2 + 2^2} = \sqrt{13}$。
- $d(O, \rho(P)) = \sqrt{(-2)^2 + 3^2} = \sqrt{13}$。
- 距离保持不变。这个点确实是在一个以原点为圆心,半径为 $\sqrt{13}$ 的圆上移动了。
- 示例2:绕原点旋转 $180^\circ$。
- 此时 $\theta=180^\circ$,$\cos 180^\circ = -1, \sin 180^\circ = 0$。
- 代入通用公式,得到 $\rho(x, y) = (x(-1) - y(0), x(0) + y(-1)) = (-x, -y)$。
- 这个变换称为“点反射”,它将每个点映射到其关于原点的对称点。
- 例如,一个顶点在 $(2,1), (-2,1), (-2,-1), (2,-1)$ 的长方形,在 $180^\circ$ 旋转后保持不变。
- 旋转中心:如果旋转中心不是原点,公式会更复杂。需要先将坐标系平移,使旋转中心成为新原点,然后旋转,再平移回去。
- 旋转角度为0:当旋转角度 $\theta = 0^\circ$ (或 $360^\circ$ 的整数倍) 时,旋转变换就成了恒等变换。
- 不动点:任何非平凡的旋转(即角度不是 $360^\circ$ 的整数倍)都只有一个不动点,那就是旋转中心 $P$。
旋转是一种将平面绕一个固定点(旋转中心)转动一个固定角度的等距变换。它有且仅有一个不动点。代数上,绕原点的旋转可以通过包含正弦和余弦的线性变换来表示。
旋转是描述许多有限图形(如正多边形、雪花)和一些无限图案(如某些壁纸图案)对称性的核心变换。有限对称群主要由旋转和反射构成。
想象你把一张纸用一个图钉钉在桌子上。图钉的位置就是旋转中心。现在你转动这张纸,纸上的所有点都绕着图钉做圆周运动。这就是一次旋转。只有图钉本身没有动。
看一个正在转动的时钟。时钟的中心是不动的,这是旋转中心。秒针的针尖在做圆周运动,它经历的就是一系列连续的旋转变换。在任何时刻,针尖到中心的距离都是不变的。
2.4 类型三:反射 (Reflection)
📜 [原文7]
反射 $\mu$:将每个点映射到其关于直线 $L$ 的镜像($\mu$ 代表镜像),直线 $L$ 上的每个点都由 $\mu$ 保持不变。参见图12.3。直线 $L$ 是反射轴。(示例:$\mu(x, y)=(y, x)$ 是关于直线 $y=x$ 的反射。)
- 定义:反射是第三种等距变换,它模拟了镜子成像的效果。它由一个关键要素定义:
- 一条反射轴 $L$:这是一条直线。
- 变换规则:对于平面上的任何一点 $P$:
- 如果 $P$ 就在反射轴 $L$ 上,那么它经过反射后保持不动,$\mu(P) = P$。
- 如果 $P$ 不在 $L$ 上,那么它的像 $\mu(P)$ 位于过 $P$ 且垂直于 $L$ 的直线上,并且 $P$ 和 $\mu(P)$ 到直线 $L$ 的距离相等,但位于 $L$ 的两侧。
- 符号:通常用希腊字母 $\mu$ (mu,代表mirror) 来表示反射。
- 几何图像:图12.3展示了一个图案,它关于中间那条垂直的反射轴 $L$ 是对称的。左边的部分是右边部分的镜像,反之亦然。如果你沿着直线 $L$ 把这张纸对折,两边的图案会完全重合。
- 代数表示:
- 原文的例子 $\mu(x, y) = (y, x)$ 是关于直线 $y=x$ 的反射。
- 直线 $y=x$ 是一条穿过原点,与 $x$ 轴成 $45^\circ$ 角的直线。
- 这个变换的作用是交换一个点的 $x$ 坐标和 $y$ 坐标。
- 例如,点 $(2, 5)$ 经过反射变成 $(5, 2)$。你可以验证这两个点关于直线 $y=x$ 是对称的。
- $\mu(x, y) = (y, x)$:
- $\mu$:反射变换的名称。
- $(x, y)$:输入点的坐标。
- $(y, x)$:输出点的新坐标。新 $x$ 坐标是旧 $y$ 坐标,新 $y$ 坐标是旧 $x$ 坐标。
- 其他简单的反射:
- 关于 $x$ 轴的反射:$\mu(x, y) = (x, -y)$。
- 关于 $y$ 轴的反射:$\mu(x, y) = (-x, y)$。
- 示例1:使用原文的例子 $\mu(x, y) = (y, x)$。
- 让点 $P=(1, 4)$。变换后为 $\mu(P) = (4, 1)$。
- 让点 $Q=(2, 2)$,这个点在反射轴 $y=x$ 上。变换后为 $\mu(Q) = (2, 2) = Q$。点 $Q$ 是不动点。
- 我们验证一下距离:$d(P, Q) = \sqrt{(2-1)^2 + (2-4)^2} = \sqrt{1^2 + (-2)^2} = \sqrt{5}$。
- $d(\mu(P), \mu(Q)) = d((4,1), (2,2)) = \sqrt{(2-4)^2 + (2-1)^2} = \sqrt{(-2)^2 + 1^2} = \sqrt{5}$。距离保持不变。
- 示例2:一个左右对称的字母 "A"。
- 假设字母 "A" 的对称轴是 $y$ 轴。
- 那么关于 $y$ 轴的反射 $\mu(x, y) = (-x, y)$ 就是它的一个对称操作。
- 例如,如果 "A" 的右上顶点是 $(1, 2)$,那么左上顶点必然是 $(-1, 2)$。$\mu(1, 2) = (-1, 2)$。
- 不动点:反射有无穷多个不动点,即反射轴 $L$ 上的所有点。
- 反射的复合:连续做两次相同的反射,会得到恒等变换。即 $\mu \circ \mu = I$。在群论中,这意味着反射是2阶元素(除了恒等变换)。
- 方向改变:反射会改变图形的“手性”或“方向”,我们稍后会详细讨论。一个左手手套经过反射会变成一个右手手套。
反射是一种关于一条固定直线(反射轴)做镜像的等距变换。它的不动点集就是反射轴本身。代数上,简单的反射表现为坐标的变号或交换。
反射是构成对称性的另一个基本要素,尤其是在描述具有 bilateral symmetry(两侧对称)的物体时,如动物、叶子等。在二面体群 $D_n$ 中,反射是与旋转同样重要的组成部分。
想象你在湖边,湖面平静如镜。你看到湖中你的倒影。这个倒影就是你本人经过以湖岸线与水面交线为反射轴的反射变换得到的结果。你身上的每个点和它在倒影中对应的点,到水面的距离都是相等的。
拿一张纸,画一个任意图形,然后沿着一条直线将纸对折。用墨水笔描摹这个图形,让墨水渗透到另一面。打开纸,你就得到了原始图形和它关于折痕的反射图形。折痕就是反射轴。
2.5 类型四:滑移反射 (Glide Reflection)
📜 [原文8]
滑移反射 $\gamma$:一个平移与一个关于被该平移映射到自身的直线的反射的乘积。参见图12.4。(示例:$\gamma(x, y)=(x+4,-y)$ 是沿 $x$ 轴的滑移反射。)
- 定义:滑移反射是四种类型中最不直观的一种。它是一个复合变换,由两步组成:
- 第一步:关于某条直线 $L$ 进行一次反射。
- 第二步:沿着同一条直线 $L$ 的方向进行一次平移。
- 关键点在于:平移的方向必须与反射的轴线平行。
- 这个操作的顺序可以交换:先平移再反射,得到的结果是完全一样的。
- 符号:通常用希腊字母 $\gamma$ (gamma) 来表示滑移反射。
- 几何图像:图12.4展示了一串脚印的图案。一个左脚印无法通过简单的平移或旋转得到下一个右脚印。你需要先将左脚印进行一次反射(变成一个右脚印的样子),然后再向前平移一段距离,才能与下一个右脚印重合。这条平移的路线(脚印序列的中心线)就是反射轴。
- 代数表示:
- 原文的例子 $\gamma(x, y)=(x+4,-y)$ 是一个沿 $x$ 轴的滑移反射。
- 我们可以把它分解来看:
- 这个变换可以看作是先做一次关于 $x$ 轴的反射:$\mu(x, y) = (x, -y)$。
- 然后再做一次沿 $x$ 轴方向的平移:$\tau(x', y') = (x'+4, y')$。
- 将两者复合:$\tau(\mu(x, y)) = \tau(x, -y) = (x+4, -y)$。
- 这里的反射轴是 $x$ 轴,平移向量是 $(4, 0)$,这个向量是平行于 $x$ 轴的。因此,这符合滑移反射的定义。
- $\gamma(x, y)=(x+4,-y)$:
- $\gamma$:滑移反射变换的名称。
- $(x, y)$:输入点的坐标。
- $(-y)$ 部分体现了关于 $x$ 轴的反射。
- $(x+4)$ 部分体现了沿 $x$ 轴方向的平移。
- 整个公式合起来就是一个滑移反射。
- 示例1:使用原文的例子 $\gamma(x, y) = (x+4, -y)$。
- 让点 $P=(1, 2)$。变换后 $\gamma(P) = (1+4, -2) = (5, -2)$。
- 分解动作:
- 先反射:$\mu(1, 2) = (1, -2)$。
- 再平移:$\tau(1, -2) = (1+4, -2) = (5, -2)$。
- 先平移:$\tau(1, 2) = (1+4, 2) = (5, 2)$。
- 再反射:$\mu(5, 2) = (5, -2)$。
- 结果相同。
- 示例2:字母 "p" 组成的图案 ... p b p b ...
- 要从一个 "p" 变成下一个 "b",你需要先将 "p" 关于一条水平中线反射,得到一个 "d",然后再平移一段距离,得到 "b" 的位置是不对的。
- 一个更好的例子是脚印。或者想象一个图案 ... / \ / \ ...。要从一个 / 变换到下一个 \,你需要先将 / 关于一条垂直轴反射,变成 \,然后再向上(或向下)滑动一段距离。这是一个滑移反射。
- 平移方向必须与反射轴平行:如果一个反射与一个平移的复合,其平移方向不平行于反射轴,那么结果将是一个不同的反射(反射轴被平移了)。它不是一个滑移反射。
- 不动点:非平凡的滑移反射(即平移距离不为零)没有任何不动点。这一点和平移是相似的。
- 平凡情况:如果滑移反射中的平移部分是恒等变换(即平移距离为0),那么它就退化成一个单纯的反射。
滑移反射是一种复合等距变换,由一个反射和一个平行于反射轴的平移组成。它没有不动点,是四种基本类型中唯一一个必须由两个不同类型变换复合而成的(在最基本形式下)。
滑移反射虽然不直观,但在描述某些周期性图案的对称性时是不可或缺的。特别是在七种带状群和十七种壁纸群的分类中,是否存在滑移反射是一个关键的区分特征。没有它,对对称性的分类就是不完整的。
滑移反射的经典模型就是走路时留下的脚印序列。你的左脚印和右脚印是彼此的镜像。从你的左脚印到下一个右脚印的变换,就是一个滑移反射:它既有“左右脚”的镜像关系(反射),又有“向前走一步”的位移(平移)。
想象在墙纸上有一排向上倾斜的箭头 ↗ ↗ ↗。现在,在它们下方有另一排方向相反的箭头 ↘ ↘ ↘。从上面一排的某个箭头到下面一排对应的箭头的变换,就是一个滑移反射。你需要先以两排箭头之间的水平中心线为轴进行反射(↗ 变成 ↘),然后再水平平移一段距离。
3等距变换与方向
3.1 方向的保持与改变
📜 [原文9]
注意,在图12.1到12.4中,每个弯曲箭头都被映射到另一个弯曲箭头。对于平移和旋转,弯曲箭头的逆时针方向保持不变,但对于反射和滑移反射,逆时针箭头被映射到顺时针箭头。我们说平移和旋转保持方向,而反射和滑移反射改变方向。我们不将恒等等距变换归类为所列四种类型中的任何一种;它可以同样被认为是零向量的平移或绕任何点旋转 $0^{\circ}$ 的旋转。我们总是将滑移反射视为不同于恒等等距变换的反射与平移的乘积。
这段话引入了另一个重要的分类标准:等距变换是否保持方向(Orientation)。
- 观察图形:
- 作者引导我们观察前面四幅图中的“手性”元素——弯曲的箭头。这些箭头可以被看作是逆时针或顺时针的。
- 在图12.1(平移)和图12.2(旋转)中,一个逆时针的弯曲箭头变换后,仍然是一个逆时针的弯曲箭头。它的“旋转方向”没有变。
- 在图12.3(反射)和图12.4(滑移反射)中,一个逆时针的弯曲箭头变换后,变成了一个顺时针的弯曲箭头。它的“旋转方向”被颠倒了。
- 定义“方向”:
- 基于上述观察,作者给出了一个等距变换的二分法:
- 保持方向的 (Orientation-preserving):如果变换不改变图形的“手性”(比如,左手手套变换后还是左手手套),那么它就是保持方向的。平移和旋转属于这一类。这些变换可以被想象成在平面内连续地移动和转动一个物体得到的,而不需要将物体“拎出”平面再翻转。
- 改变方向的 (Orientation-reversing):如果变换颠倒了图形的“手性”(左手手套变成右手手套),那么它就是改变方向的。反射和滑移反射属于这一类。这些变换都包含了一个“翻转”或“镜像”的步骤。
- 数学上的理解:
- 一个更严格的定义与线性代数中的行列式有关。任何一个等距变换都可以表示为一个正交矩阵 $A$ 的乘法加上一个平移向量 $\mathbf{b}$,即 $\phi(\mathbf{x}) = A\mathbf{x} + \mathbf{b}$。
- 如果行列式 $\det(A) = +1$,则该变换保持方向。平移和旋转的矩阵行列式为+1。
- 如果行列式 $\det(A) = -1$,则该变换改变方向。反射和滑移反射的矩阵行列式为-1。
- 关于特殊情况的说明:
- 恒等变换:作者指出,恒等变换是一个特殊情况,没有被归入这四种“非平凡”类型中。它可以被看作是平移的特例(平移0距离)或旋转的特例(旋转0度)。由于这两种都是保持方向的,所以恒等变换是保持方向的。
- 滑移反射的定义:作者强调,当我们谈论滑移反射时,我们指的是一个反射和一个非零平移的复合。如果平移距离为零,它就退化为一个纯粹的反射。这确保了四种类型的划分是清晰的(除了恒等变换)。
- 旋转(保持方向):$\rho(x, y)=(-y, x)$。其矩阵形式是 $\begin{pmatrix} 0 & -1 \\ 1 & 0 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$。矩阵的行列式是 $(0)(0) - (-1)(1) = +1$。所以它保持方向。
- 反射(改变方向):$\mu(x, y)=(y, x)$。其矩阵形式是 $\begin{pmatrix} 0 & 1 \\ 1 & 0 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix}$。矩阵的行列式是 $(0)(0) - (1)(1) = -1$。所以它改变方向。
- 滑移反射(改变方向):$\gamma(x, y)=(x+4, -y)$。它可以表示为 $\begin{pmatrix} 1 & 0 \\ 0 & -1 \end{pmatrix} \begin{pmatrix} x \\ y \end{pmatrix} + \begin{pmatrix} 4 \\ 0 \end{pmatrix}$。矩阵的行列式是 $(1)(-1) - (0)(0) = -1$。所以它改变方向。
- 复合变换的方向:
- 两个保持方向的变换复合,结果仍然保持方向 (+1 * +1 = +1)。
- 两个改变方向的变换复合,结果会保持方向 (-1 * -1 = +1)。例如,两次反射的复合可以得到一个旋转或平移。
- 一个保持方向和一个改变方向的变换复合,结果会改变方向 (+1 * -1 = -1)。
平面等距变换可以根据其是否改变图形的“手性”分为两类:保持方向的(平移、旋转)和改变方向的(反射、滑移反射)。这个性质在代数上对应于其线性部分矩阵的行列式是+1还是-1。
引入“方向”这一概念至关重要。在群论中,所有保持方向的等距变换构成了整个平面等距变换群 $E(2)$ 的一个非常重要的正规子群,称为特殊欧几里得群 $SE(2)$。这个子群的指数为2,意味着它恰好包含了 $E(2)$ 中一半的元素。这个结构在后续证明定理12.5时会起到关键作用。
想象你的左右手。它们互为镜像,但你无法通过在三维空间中旋转或移动你的左手,让它变成一只右手(除非你把它翻过来,但这需要进入“第四维”)。
- 保持方向的变换就像你移动你的左手,它始终是左手。
- 改变方向的变换就像照镜子,镜子里的左手看起来像一只右手。
拿一张写有字母“F”的透明塑料片。
- 平移:你在桌面上滑动它,它始终是“F”。
- 旋转:你绕着某个点旋转它,它可能变成“Ⅎ”或“ⱻ”,但你总能看出它原始的形状,没有被“镜像”。
- 反射:你把它翻过来,它就变成了“ꟻ”。这是一个镜像字母,方向改变了。
- 滑移反射:你把它翻过来,然后再滑动一段距离。它还是“ꟻ”的形状。
4有限等距变换群的结构
4.1 定理12.5
📜 [原文10]
以下定理描述了全等距变换群的有限子群的可能结构。
12.5 定理
平面上的每个有限等距变换群 $G$ 都同构于 $\mathbb{Z}_{n}$ 或二面体群 $D_{n}$,其中 $n$ 是某个正整数。
这是本节的第一个核心定理,它对平面上所有可能的“有限对称性”进行了完全分类。
- 定理的对象:
- 定理研究的是“有限等距变换群 $G$”。
- “群 $G$”:这意味着它是一个满足群公理的等距变换的集合。
- “有限”:意味着这个群里只有有限个等距变换元素。
- 这正好对应于一个有界、非无限延伸的图形的对称群。例如,正方形的对称群 $D_4$ 有8个元素,是有限的。而一条无限长的直线的对称群是无限的(包含任意距离的平移)。
- 核心结论:
- 定理断言,任何这样的有限等距变换群,无论它看起来多复杂,其内在的代数结构必然与以下两类群中的一种同构(structurally identical)。
- 第一类:循环群 $\mathbb{Z}_n$
- $\mathbb{Z}_n$ 是整数模 $n$ 加法群,它是一个由单个元素生成(即“循环”)的 $n$ 阶阿贝尔群(交换群)。
- 在几何上,$\mathbb{Z}_n$ 同构于一个只包含旋转的对称群。想象一个有 $n$ 个叶片的风车,它只有 $n$ 个旋转对称操作(包括旋转0度),没有反射对称。它的对称群就是 $\mathbb{Z}_n$。
- 第二类:二面体群 $D_n$
- $D_n$ 是一个 $n$ 边正多边形的对称群,它有 $2n$ 个元素。
- 它包含 $n$ 个旋转(构成了 $\mathbb{Z}_n$ 子群)和 $n$ 个反射。
- $D_n$ 是一个非阿贝尔群(非交换群),因为旋转和反射的复合顺序通常会影响结果。
- 在几何上,这对应于一个既有旋转对称性又有反射对称性的图形的对称群,最典型的例子就是正 $n$ 边形。
- 定理的威力:
- 这个定理非常强大,因为它排除了任何其他可能性。你不可能在平面上构造一个具有有限对称性的图形,其对称群在结构上是全新的,例如同构于交错群 $A_4$ 或四元数群 $Q_8$。平面的几何约束只允许 $\mathbb{Z}_n$ 和 $D_n$ 这两种结构存在。
- 示例1:$\mathbb{Z}_3$
- 考虑一个三叶风车形状(triskelion)。它有3个对称操作:旋转 $0^\circ, 120^\circ, 240^\circ$。
- 这个群有3个元素,由旋转 $120^\circ$ 的操作生成,其结构与 $\mathbb{Z}_3$ 同构。
- 示例2:$D_3$ (同构于 $S_3$)
- 考虑一个等边三角形。它有6个对称操作:3个旋转($0^\circ, 120^\circ, 240^\circ$)和3个反射(关于3条角平分线的反射)。
- 这个群有6个元素,其结构与二面体群 $D_3$ 同构。
- 示例3:花朵的对称性
- 一朵有5个花瓣、辐射对称的梅花,如果不考虑细微差别,它的对称群是 $D_5$,有10个元素。
- 一个被设计成纯旋转对称的、有5个旋臂的标志,其对称群是 $\mathbb{Z}_5$,有5个元素。
- 同构 vs 相等:定理说的是同构,而不是群相等。一个图形的对称群由具体的等距变换(旋转、反射)组成,而 $\mathbb{Z}_n$ 的元素是模 $n$ 的整数。它们是不同的集合,但它们的运算结构(群表)是完全一样的。
- $n$ 的取值:$n$ 可以是任何正整数。$n=1$ 是特殊情况:$\mathbb{Z}_1$ 是只含单位元的平凡群,对应完全不对称的图形。$D_1$ 是一个2阶群,包含恒等变换和一次反射,对应只有一条反射轴的对称图形(如字母 "A")。
- 定理只针对有限群:这个定理不适用于无限群,如一条直线或一个无限棋盘格的对称群。那些群的分类将在后面讨论。
定理12.5(也称为列奥纳多定理)是一个里程碑式的分类结果,它指出平面上任何有限的对称群在结构上必然等同于循环群 $\mathbb{Z}_n$(纯旋转对称)或二面体群 $D_n$(旋转加反射对称)。
这个定理的存在,极大地简化了对平面有限对称性的研究。它提供了一个完整的“目录”,告诉我们只需要理解 $\mathbb{Z}_n$ 和 $D_n$ 这两种群的结构,就等于理解了所有可能的平面有限对称性。这为晶体学、化学(分子对称性)、艺术和设计等领域提供了坚实的数学理论基础。
想象你在商店里买雪花形状的挂饰。虽然雪花挂饰的样式千奇百怪,但如果你只关注它们的对称性,你会发现它们都符合一个规律:它们要么只能旋转(像风车),要么既能旋转又能翻转(像标准的六角雪花)。这个定理告诉你,这种规律是必然的,而且只有这两种模式,分别对应 $\mathbb{Z}_n$ 和 $D_n$。
你正在用一个万花筒观察。你放入的彩色碎纸片可以形成各种各样美丽的图案。但无论图案多复杂,你从目镜里看到的图案总是具有高度的对称性,通常是 $D_n$ 型的(由几面镜子的夹角决定)。这个定理就像在说,二维平面的几何法则本身就像一个万花筒,它只允许形成特定对称性($\mathbb{Z}_n$ 或 $D_n$)的有限群。
4.2 证明纲要
📜 [原文11]
首先我们证明平面上存在一个点 $P$,它被 $G$ 中的每个等距变换固定。这可以通过以下方式,使用平面坐标来完成。假设 $G=\left\{\phi_{1}, \phi_{2}, \cdots, \phi_{m}\right\}$ 并且令
那么点
是集合 $S=\left\{\left(x_{i}, y_{i}\right) \mid i=1,2, \cdots, m\right\}$ 的质心。$G$ 中的等距变换将 $S$ 中的点相互置换,因为如果 $\phi_{i} \phi_{j}=\phi_{k}$,则 $\phi_{i}\left(x_{j}, y_{j}\right)=\phi_{i}\left\{\phi_{j}(0,0)\right]= \phi_{k}(0,0)=\left(x_{k} \cdot y_{k}\right)$。可以证明,一个点集的质心由它到这些点的距离唯一确定,并且由于 $G$ 中的每个等距变换只是置换集合 $S$,它必然固定质心 $(\bar{x} . \bar{y})$。因此,$G$ 由恒等变换、绕 $P$ 的旋转和关于穿过 $P$ 的直线的反射组成。
这是定理12.5证明的第一部分,也是最关键的一步:证明任何有限等距变换群 $G$ 必然有一个公共不动点。
- 目标:找到一个点 $P$,使得对于群 $G$ 中的任何一个变换 $\phi$,都有 $\phi(P) = P$。这个点 $P$ 将成为所有对称操作的中心。
- 构造候选点:
- 证明者使用了一个非常巧妙的构造方法:质心法。
- 首先,任意选择平面上的一个点,最方便的是原点 $O=(0,0)$。
- 让群 $G$ 中的每一个变换 $\phi_i$ (总共有 $m$ 个) 都作用于原点 $O$,得到一个点的集合 $S = \{\phi_1(O), \phi_2(O), \ldots, \phi_m(O)\}$。我们将这些点的坐标记为 $(x_i, y_i) = \phi_i(0,0)$。这个集合 $S$ 被称为原点 $O$ 在群 $G$ 作用下的轨道(Orbit)。
- 然后,计算这个点集 $S$ 的质心(或算术平均点)$P$。$P$ 的坐标就是 $S$ 中所有点的坐标的平均值。
- $P_x = \bar{x} = \frac{x_1 + x_2 + \ldots + x_m}{m}$
- $P_y = \bar{y} = \frac{y_1 + y_2 + \ldots + y_m}{m}$
- 证明候选点是公共不动点:
- 现在需要证明这个构造出来的质心 $P$ 就是我们想要的公共不动点。
- 我们需要证明,对于 $G$ 中任意一个变换 $\phi_j$,都有 $\phi_j(P) = P$。
- 首先,我们需要理解 $\phi_j$ 如何作用于点集 $S$。原文中有一个简短的论证:取 $S$ 中的任意一点 $(x_k, y_k) = \phi_k(0,0)$,让 $\phi_j$ 作用于它。结果是 $\phi_j(\phi_k(0,0)) = (\phi_j \circ \phi_k)(0,0)$。因为 $G$ 是一个群,所以 $\phi_j \circ \phi_k$ 的结果必然是 $G$ 中的另一个元素,我们称之为 $\phi_l$。所以 $\phi_j(\phi_k(0,0)) = \phi_l(0,0)$,结果仍然在集合 $S$ 中。此外,如果 $\phi_k \neq \phi_{k'}$, 那么 $\phi_j \circ \phi_k \neq \phi_j \circ \phi_{k'}$ (根据群的消去律),所以 $\phi_j$ 只是对 $S$ 中的点进行了一次置换(重新排列)。
- 关键性质:等距变换保持质心。因为等距变换是线性的(严格来说是仿射的),它保持加法和标量乘法(在向量意义上)。所以,一个点集的质心经过等距变换后,会变成变换后新点集的质心。
- 即 $\phi_j(P) = \phi_j(\text{centroid}(S)) = \text{centroid}(\phi_j(S))$。
- 因为 $\phi_j$ 只是置换了 $S$ 中的点,所以变换后的点集 $\phi_j(S)$ 与原始点集 $S$ 是完全相同的集合,只是元素的顺序可能变了。
- 因此,它们的质心也必然是相同的:$\text{centroid}(\phi_j(S)) = \text{centroid}(S) = P$。
- 综上,我们得到 $\phi_j(P) = P$。由于 $\phi_j$ 是 $G$ 中任意一个元素,所以 $P$ 是 $G$ 中所有变换的公共不动点。
- 结论:
- 既然所有变换都固定点 $P$,那么这些变换不可能是平移或滑移反射(因为它们没有不动点,除非是平凡情况)。
- 因此,一个有限等距变换群 $G$ 中的所有非恒等变换,必然只能是绕公共不动点 $P$ 的旋转,或者是关于穿过 $P$ 的直线的反射。
- 这极大地简化了问题,将我们的研究范围从四种变换缩小到了两种。
- $G=\left\{\phi_{1}, \phi_{2}, \cdots, \phi_{m}\right\}$:
- $G$ 是一个有限群,包含 $m$ 个元素。
- $\phi_i$ 是群中的一个元素,即一个等距变换。
- $\left(x_{i}, y_{i}\right)=\phi_{i}(0,0)$:
- 这是定义点集 $S$ 中第 $i$ 个点坐标的方式。它是第 $i$ 个变换作用于原点的结果。
- $P=(\bar{x}, \bar{y})=\left(\frac{x_{1}+x_{2}+\cdots+x_{m}}{m}, \frac{y_{1}+y_{2}+\cdots+y_{m}}{m}\right)$:
- 这是质心的定义公式。
- $\bar{x}$ 是所有 $x_i$ 的算术平均值。
- $\bar{y}$ 是所有 $y_i$ 的算术平均值。
- $\phi_{i}\left(x_{j}, y_{j}\right)=\phi_{i}\left\{\phi_{j}(0,0)\right\}= \phi_{k}(0,0)=\left(x_{k} \cdot y_{k}\right)$:
- 这个推导展示了 $G$ 中的变换 $\phi_i$ 会将点集 $S$ 映射到自身。
- $\phi_{i}\left\{\phi_{j}(0,0)\right\}$ 是 $\phi_i$ 作用于 $S$ 中的一个点。
- 根据函数复合的定义,这等于 $(\phi_i \circ \phi_j)(0,0)$。
- 因为 $G$ 是一个群,$\phi_i \circ \phi_j$ 的结果是群中的另一个元素 $\phi_k$。
- 所以结果是 $\phi_k(0,0)$,它就是 $S$ 中的点 $(x_k, y_k)$。
- 考虑正方形的对称群 $D_4$ 中的一个子群 $G = \{\rho_0, \rho_{180}, \mu_x, \mu_y\}$,其中 $\rho_0$ 是恒等变换, $\rho_{180}$ 是旋转180度, $\mu_x$ 是关于x轴的反射, $\mu_y$ 是关于y轴的反射。这是一个4阶群(同构于克莱因四元群 $V$)。
- 群 $G$ 的元素及其对原点 $(0,0)$ 的作用:
- $\phi_1 = \rho_0(x,y) = (x,y)$, $\phi_1(0,0) = (0,0)$
- $\phi_2 = \rho_{180}(x,y) = (-x,-y)$, $\phi_2(0,0) = (0,0)$
- $\phi_3 = \mu_x(x,y) = (x,-y)$, $\phi_3(0,0) = (0,0)$
- $\phi_4 = \mu_y(x,y) = (-x,y)$, $\phi_4(0,0) = (0,0)$
- 构造点集 $S$:在这个例子中,所有变换都固定了原点,所以 $S = \{(0,0), (0,0), (0,0), (0,0)\} = \{(0,0)\}$。
- 计算质心 $P$:$P = (\frac{0+0+0+0}{4}, \frac{0+0+0+0}{4}) = (0,0)$。
- 验证 $P$ 是不动点:显然,这个群的所有变换都固定了原点 $(0,0)$。
- 更有趣的例子:考虑一个等边三角形,其顶点为 $A(1,0), B(-1/2, \sqrt{3}/2), C(-1/2, -\sqrt{3}/2)$。它的对称群 $D_3$ 有6个元素。如果我们取原点 $(0,0)$,它正好是三角形的中心,本身就是公共不动点。
- 如果取一个偏离中心的点呢? 假设我们选择 $A(1,0)$ 作为我们的“原点”来构造质心。$D_3$ 的6个变换作用于 $A$ 会得到什么?
- 恒等变换 $\rightarrow A(1,0)$
- 旋转 $120^\circ$ $\rightarrow B(-1/2, \sqrt{3}/2)$
- 旋转 $240^\circ$ $\rightarrow C(-1/2, -\sqrt{3}/2)$
- 关于过A的对称轴的反射 $\rightarrow A(1,0)$
- 关于过B的对称轴的反射 $\rightarrow C(-1/2, -\sqrt{3}/2)$
- 关于过C的对称轴的反射 $\rightarrow B(-1/2, \sqrt{3}/2)$
- 点集 $S$ 为 $\{A, B, C, A, C, B\}$,去重后为 $\{A, B, C\}$。
- 计算质心(注意每个点出现了两次):$P_x = \frac{1 - 1/2 - 1/2 + 1 - 1/2 - 1/2}{6} = \frac{0}{6} = 0$。$P_y = \frac{0 + \sqrt{3}/2 - \sqrt{3}/2 + 0 - \sqrt{3}/2 + \sqrt{3}/2}{6} = \frac{0}{6} = 0$。
- 质心是 $(0,0)$!这正是三角形的几何中心,也是所有对称操作的公共不动点。这个例子完美展示了即使从一个非中心的点出发,质心构造法依然能准确地找到那个唯一的公共不动点。
- 证明的精髓:证明的关键不在于质心公式本身,而在于“一个等距变换作用于一个点集,不会改变这个点集的质心,只要这个变换只是对点集内部的点进行重新排列”。
- 无限群不适用:这个证明方法严重依赖于群的“有限性”,因为需要对所有 $m$ 个点进行求和和平均。对于无限群(如包含平移的群),这个方法会失效,因为它们通常没有公共不动点。
证明的第一步通过构造“轨道上的点的质心”这一巧妙方法,证明了任何有限平面等距变换群都必须有一个公共不动点。这一结论是决定性的,因为它直接排除了非平凡的平移和滑移反射,使得群的元素只能是旋转和反射,且这些操作都围绕着同一个中心点进行。
这是证明的核心,是通往最终分类结果的必经之路。通过找到一个“中心”,它将一个看似宽泛的几何问题(任意有限等距变换群)转化为一个更具体、更易于分析的代数问题(一个只包含以某点为中心的旋转和反射的群的结构)。
想象一个有限的舞者群体 $G$ 在一个无限大的舞池里跳舞。每个舞者 $\phi_i$ 都代表一种独特的、覆盖整个舞池的刚性移动。我们在舞池中心画一个点 $O$。每个舞者 $\phi_i$ 都把这个点 $O$ 移动到了一个新的位置 $\phi_i(O)$。我们把所有这些新位置的几何中心(质心)标记为 $P$。现在,无论哪个舞者 $\phi_j$ 再来跳一支舞(对整个舞池进行移动),虽然 $O$ 的像被移动了,但那堆由 $O$ 的像构成的点的集合 $S$ 只是内部重新洗牌了,整个集合的“重心”$P$ 却纹丝不动。因此,$P$ 是这场“有限之舞”的永恒中心。
你用相机给一个正六边形拍了一张照片。然后你旋转、翻转这个六边形,让它回到原位(对称操作),再拍一张。你把所有可能的6个旋转和6个反射都做一遍,拍了12张照片。现在,在第一张照片上,你任意选一个点,比如背景里的一个小瑕疵。在12张照片里找到这个瑕疵对应的12个位置。计算这12个位置的平均坐标,你会惊奇地发现,这个平均点恰好就是那个六边形的中心点。而且,这个中心点在所有12张照片里都位于同一个位置。
4.3 证明纲要(续)
📜 [原文12]
$G$ 中保持方向的等距变换构成了 $G$ 的一个子群 $H$,它要么是 $G$ 的全部,要么是阶为 $m/2$ 的子群。这可以用我们证明偶置换是 $S_{n}$ 的一个只包含 $S_{n}$ 一半元素的子群的相同方法来证明。(参见练习22。)当然,$H$ 由恒等变换和 $G$ 中的旋转组成。如果我们在 $G$ 中选择一个以尽可能小的角度 $\theta>0$ 旋转平面的旋转,它可以被证明生成子群 $H$。(参见练习23。)这表明如果 $H=G$,那么 $G$ 是 $m$ 阶循环群,因此同构于 $\mathbb{Z}_{m}$。假设 $H \neq G$,因此 $G$ 包含一些反射。令 $H=\left\{\iota, \rho_{1}, \cdots, \rho_{n-1}\right\}$,其中 $n=m/2$。如果 $\mu$ 是 $G$ 中的一个反射,那么陪集 $H \mu$ 由 $G$ 中的所有 $n$ 个反射组成。
这是证明的第二部分,它利用“方向”的性质将问题分解为两种情况。
- 构造旋转子群 H:
- 我们已经知道 $G$ 的元素只能是旋转和反射。
- 旋转是保持方向的,反射是改变方向的。
- 我们把 $G$ 中所有保持方向的变换(也就是所有的旋转,加上恒等变换)收集起来,称之为集合 $H$。
- $H$ 是 $G$ 的一个子群。为什么?
- 封闭性:两个旋转的复合还是一个旋转(或恒等变换),都保持方向。
- 单位元:恒等变换保持方向,在 $H$ 中。
- 逆元:一个旋转的逆变换还是一个旋转,也保持方向。
- 所以,$H$ 是一个只包含旋转的子群。
- 子群 H 的大小:
- 作者断言,$H$ 的大小(阶)要么等于 $G$ 的大小($|H|=|G|=m$),要么恰好是 $G$ 的一半($|H|=m/2$)。
- 这个证明思路与证明交错群 $A_n$ 是对称群 $S_n$ 的一个指数为2的子群完全一样。
- 我们可以定义一个符号函数 sgn,对于保持方向的变换值为+1,改变方向的为-1。这是一个从 $G$到群 $\{+1, -1\}$ 的群同态。
- $H$ 正是这个同态的核(所有被映射到+1的元素)。根据第一同构定理,$G/H$ 同构于 sgn 的像。
- 情况一:如果 $G$ 中没有改变方向的变换(没有反射),那么 sgn 的像只有 $\{+1\}$,$G=H$。
- 情况二:如果 $G$ 中至少有一个反射 $\mu$,那么 sgn 的像就是 $\{+1, -1\}$。此时 $G/H$ 的阶为2,所以 $|G|/|H|=2$,即 $|G|=2|H|$ 或 $|H|=|G|/2$。
- 情况一:G 只包含旋转 ($H=G$)
- 如果 $G$ 中所有的变换都保持方向,那么 $G$ 就是一个有限的纯旋转群。
- 作者指出,这样的群必然是循环群。
- 证明思路是:因为群是有限的,所以必然存在一个旋转角度最小的非零旋转,称之为 $\rho_\theta$。可以证明,$G$ 中的任何其他旋转都必然是 $\rho_\theta$ 的整数次幂(即重复应用 $\rho_\theta$)。(这个证明类似于证明整数加法群的任何子群都是循环群的证明)。
- 因此,这个群 $G$ 是由 $\rho_\theta$ 生成的循环群。如果它有 $m$ 个元素,那么它就同构于 $\mathbb{Z}_m$。
- 情况二:G 既包含旋转又包含反射 ($H \neq G$)
- 此时,$G$ 中改变方向的变换(反射)存在。根据前面的分析,旋转子群 $H$ 的大小 $|H| = n = m/2$。
- 这意味着 $G$ 中有 $n$ 个旋转(包括恒等变换)和 $n$ 个反射。
- $H = \{\rho_0, \rho_1, \ldots, \rho_{n-1}\}$ 是这 $n$ 个旋转的集合。
- 取 $G$ 中任意一个反射 $\mu$。
- 考虑由 $\mu$ 生成的 $H$ 的右陪集 $H\mu = \{h \circ \mu \mid h \in H\}$。
- $H\mu$ 中的每个元素都是一个旋转(保持方向)和一个反射(改变方向)的复合,所以结果一定是改变方向的,即一定是一个反射。
- $H\mu$ 中有 $|H| = n$ 个元素,并且它们互不相同。
- 由于 $G$ 中总共只有 $n$ 个反射,所以 $H\mu$ 这个集合恰好就是 $G$ 中所有反射的集合。
- 因此,群 $G$ 可以被完美地分解为两部分:旋转子群 $H$ 和反射集合 $H\mu$。
证明的第二步利用“方向”将问题分解。首先分离出所有保持方向的变换,构成旋转子群 $H$。然后分情况讨论:
- 如果群 $G$ 中没有改变方向的变换,那么 $G=H$ 是一个纯旋转群,其结构被证明是循环群 $\mathbb{Z}_n$。
- 如果群 $G$ 中有改变方向的变换,那么 $G$ 由一半的旋转和一半的反射构成。旋转部分构成一个子群 $H$,反射部分是这个子群的一个陪集。这为接下来证明其为 $D_n$ 结构铺平了道路。
这一步是典型的代数分析方法。通过研究子群及其陪集,将一个复杂的群结构分解为更简单、更易于理解的部分。这是群论威力的体现。将几何问题(等距变换群)转化为代数问题(子群、陪集、同构)是解决这类问题的关键策略。
想象一个班级 $G$ 的学生,他们分为两类:男生(改变方向)和女生(保持方向)。
- 首先,我们发现所有女生自己构成了一个小团体 $H$(女生和女生交往的结果还是女生,满足子群性质)。
- 情况一:全班都是女生。那么这个班级 $G$ 就是那个女生团体 $H$。她们的社交模式比较简单,可能就是围成一圈传东西(循环群)。
- 情况二:班级里有男生。我们发现,只要有一个男生存在,那么男生和女生的数量就必然一样多($|H|=|G|/2$)。整个班级可以分为“女生团体”和“男生团体”。并且,“男生团体”可以通过让任何一个男生 $\mu$ 与所有女生分别组队得到($H\mu$)。这揭示了一种深刻的对称结构。
4.4 证明纲要(完)
📜 [原文13]
现在考虑平面上的一个正 $n$ 边形,以 $P$ 为中心,并且有一个顶点位于被 $\mu$ 固定的直线上。$H$ 的元素将这个$n$ 边形旋转到所有位置,而 $H \mu$ 的元素首先通过一个顶点的轴反射,有效地将$n$ 边形翻转过来,然后旋转到所有位置。因此,$G$ 对这个$n$ 边形的作用是 $D_{n}$ 的作用,所以 $G$ 同构于 $D_{n}$。
这是证明的最后一步,将上一步得到的抽象代数结构 ($G = H \cup H\mu$) 与一个具体的几何对象(正 $n$ 边形)联系起来,从而完成同构的证明。
- 回到几何:
- 我们处于情况二:群 $G$ 有 $n$ 个旋转和 $n$ 个反射。旋转子群 $H$ 是一个 $n$ 阶循环群,由一个最小角度为 $360/n$ 度的旋转 $\rho$ 生成。所有这些操作都围绕公共不动点 $P$ 进行。
- $\mu$ 是我们从 $G$ 中随便选的一个反射。它的反射轴是一条穿过 $P$ 的直线 $L$。
- 构造一个关键的几何图形:
- 证明者非常巧妙地构造了一个正 $n$ 边形。这个正 $n$ 边形不是凭空来的,而是被群 $G$ 的结构“暗示”的。
- 构造方法:
- 中心:以公共不动点 $P$ 为中心。
- 顶点位置:在反射 $\mu$ 的反射轴 $L$ 上,随便选一个不是 $P$ 的点 $V_1$,作为第一个顶点。
- 其他顶点:用 $H$ 中的 $n$ 个旋转作用于 $V_1$,得到 $n$ 个点:$V_1, \rho(V_1), \rho^2(V_1), \ldots, \rho^{n-1}(V_1)$。
- 为什么这 $n$ 个点构成一个正 $n$ 边形?因为它们都是从同一点 $V_1$ 通过绕中心 $P$ 旋转 $k \cdot (360/n)$ 度得到的,所以它们到 $P$ 的距离都相等(都在同一个圆上),且相邻顶点之间的夹角都是 $360/n$ 度。这正是正 $n$ 边形的定义。
- 群 G 如何作用于这个正 n 边形:
- 旋转部分 $H$:$H$ 中的 $n$ 个旋转($\rho^0, \rho^1, \ldots, \rho^{n-1}$)作用在这个正 $n$ 边形上,会怎么样?它们恰好就是将这个正 $n$ 边形旋转到自身的所有 $n$ 个旋转对称操作。这正是二面体群 $D_n$ 中旋转子群的作用。
- 反射部分 $H\mu$:$H\mu$ 的元素是形如 $\rho^k \circ \mu$ 的变换。让我们看看它们如何作用于这个正 $n$ 边形。
- 首先,$\mu$ 作用于正 $n$ 边形。由于正 $n$ 边形的一个顶点 $V_1$ 就在 $\mu$ 的反射轴上,所以 $\mu$ 就是这个正 $n$ 边形的一次反射对称操作(沿着通过顶点 $V_1$ 和中心 $P$ 的对称轴的反射)。这个操作将正 $n$ 边形“翻转”了过来。
- 然后,再对这个翻转过的正 $n$ 边形进行 $\rho^k$ 旋转。
- 这一系列“先翻转再旋转”的操作,恰好对应了二面体群 $D_n$ 中所有的 $n$ 个反射操作。
- 结论:群 $G$ 中的 $2n$ 个元素,作用在这个我们构造出来的正 $n$ 边形上时,其效果与正 $n$ 边形的对称群 $D_n$ 的 $2n$ 个元素的效果一一对应,完全相同。
- 同构:
- 这种一一对应的作用关系,正是群同构的体现。
- 我们找到了一个几何对象(正 $n$ 边形),它的对称群是 $D_n$。而我们的抽象群 $G$ 作用在这个对象上的方式与 $D_n$ 完全一样。
- 因此,我们可以得出结论,抽象群 $G$ 的内在结构与二面体群 $D_n$ 同构。
- 证明完成:
- 综合所有情况:任何有限平面等距变换群 $G$,要么只包含旋转(同构于 $\mathbb{Z}_n$),要么包含旋转和反射(同构于 $D_n$)。定理得证。
证明的最后一步是画龙点睛之笔。它将前面抽象的代数分解 ($G=H \cup H\mu$) 重新具象化。通过利用群 $G$ 自身的结构(旋转子群的阶 $n$,反射轴的位置)来构造一个“测试对象”——一个正 $n$ 边形。然后证明 $G$ 的所有元素对这个正 $n$ 边形的作用,与 $D_n$ 的标准作用是完全一致的,从而建立了同构关系,完成了分类。
这一步展示了在代数和几何之间建立联系的重要性。纯粹的代数推导告诉我们群的结构,但通过构造一个具体的几何模型,我们可以直观地“看到”这个结构是什么样子。这种在抽象和具体之间来回切换的思维方式是现代数学研究的特点。
我们发现了一个神秘的部落 $G$,知道他们有 $n$ 个“内向者”(旋转)和 $n$ 个“外向者”(反射)。内向者们自己玩,规则很简单(循环群 $H$)。为了搞清楚整个部落的社交规则,我们做了一个实验:
我们在地上画了一个大圆圈,中心是他们的首领 $P$。我们找到一个外向者 $\mu$,看他站在哪条线上,然后在线上放一块蛋糕 $V_1$。然后我们让内向者们轮流把蛋糕传递下去,形成了 $n$ 块蛋糕,构成一个正 $n$ 边形。
我们发现,这个部落的所有社交活动(变换),都完美地对应于对这圈蛋糕的各种对称摆放方式($D_n$)。内向者们只是把蛋糕传来传去(旋转),而外向者们会先把蛋糕盘子整个翻个面,再传来传去(反射)。于是我们断定:这个部落的社交结构就是 $D_n$。
5无限等距变换群:离散带状群
5.1 带状群介绍
📜 [原文14]
前面的定理完整地描述了有限平面等距变换群。现在我们转向一些在装饰和艺术中自然出现的无限平面等距变换群。其中包括离散带状群。离散带状由有限宽度和高度的图案组成,沿其基线向两个方向无限重复,形成无限长但有限高的条带;可以将其视为沿着房间天花板边缘的装饰性边带。我们考虑那些将每个基本图案映射到自身或带状中该图案的另一个实例的等距变换。所有这些等距变换的集合称为“带状群”。
这段话从有限群转向无限群,引入了第一类要研究的无限对称群——离散带状群。
- 从有限到无限:
- 作者首先总结,关于有限群的分类已经完成(定理12.5)。现在要进入新的领域:无限等距变换群。
- 这些群在现实世界中很常见,尤其是在艺术和装饰领域,如壁纸、地砖、饰边等。
- 定义“离散带状” (Discrete Frieze):
- 带状:可以想象成一条无限长的花边或饰带。
- 图案:这条带子是由一个“基本图案”或“母题”(motif)不断重复而成的。
- 有限宽度和高度:这个基本图案本身的大小是有限的。
- 无限重复:图案沿着一条直线(基线)向左右两个方向无限地复制粘贴。
- 离散:这个词意味着重复的单位是分立的,不连续。也就是说,存在一个最小的平移距离,能让图案与自身重合。它排除了像一条光秃秃的直线那样的连续对称性。
- 定义“带状群” (Frieze Group):
- 和之前定义对称群一样,带状群是特定带状图案的对称群。
- 它包含了所有能让该无限带状图案整体保持不变的平面等距变换。
- 一个对称操作要么将某个基本图案单元映射回自身,要么将它映射到这条带状上另一个完全相同的图案单元上。
- 示例图案: ... > > > > > ...
- 基本图案:一个箭头 >。
- 基线:穿过所有箭头的水平线。
- 这是一个离散带状图案。
- 对称操作:
- 平移:如果箭头间距为1个单位,那么向右平移1, 2, 3, ... 个单位都是对称操作。向左平移也是。
- 反射:关于穿过箭头中心的水平线进行反射,图案也保持不变。
- 带状群就是所有这些操作(以及它们的复合)构成的群。
本段引入了离散带状群的概念,它是研究一维周期性图案对称性的数学工具。一个带状群是某个无限长、有限宽的重复图案的所有对称操作(等距变换)构成的群。
从有限图形的对称性(点群)扩展到无限周期性图案的对称性(空间群)是对称性研究的一大步。带状群是一维空间群,是理解更复杂的二维壁纸群的绝佳入门。它们在化学(聚合物链)、物理(一维晶格)和艺术史(装饰图案分析)中都有应用。
想象一条无限长的电影胶片。每一帧的画面都是一样的。
- 这条胶片就是一个离散带状。
- 将胶片向前或向后移动一整帧、两整帧...的距离,画面看起来没有变化。这些就是平移对称操作。
- 如果每一帧的画面本身是左右对称的,那么关于画面垂直中线的反射也是一个对称操作。
- 带状群就是描述这卷无限长胶片所有对称性的“操作手册”。
你正站在一条无限长的铁轨中央。铁轨由一节一节的枕木和铁轨组成,无限延伸向远方。
- 这条铁轨就是一个离散带状图案。
- 你向前走一步,正好跨过一节枕木的距离,你看到的景象和原来一模一样。这就是平移对称。
- 这个铁轨图案的带状群包含了所有能让你“感觉不到自己移动了”的动作。
5.2 带状群的基本性质和示例1
📜 [原文15]
所有离散带状群都是无限的,并且拥有一个同构于 $\mathbb{Z}$ 的子群,该子群由将带状沿长度方向平移,直到基本图案与该方向上其下一个相邻图案的位置重合的平移生成。作为一个简单的离散带状示例,考虑间隔相等的积分符号,向左和向右无限延伸,示意图如下。
我们假设积分符号之间相距一个单位。这个带状的对称群由一个将平面向右滑动一个单位的平移 $\tau$ 和一个绕某个积分符号中心点旋转 $180^{\circ}$ 的旋转 $\rho$ 生成。没有水平或垂直反射,也没有滑移反射。这个带状群是非阿贝尔群;我们可以验证 $\tau \rho=\rho \tau^{-1}$。第 $n$ 个二面体群 $D_{n}$ 由两个不交换的元素生成,一个是阶为 $n$ 的 $360/n^{\circ}$ 旋转 $\rho_{1}$,另一个是阶为 2 的反射 $\mu$,满足 $\rho_{1} \mu=\mu \rho_{1}^{-1}$。因此,很自然地用符号 $D_{\infty}$ 来表示这个由无限阶的 $\tau$ 和 2 阶的 $\rho$ 生成的非阿贝尔带状群。
这段话阐述了所有带状群的一个共性,并给出了第一个具体的带状群例子及其分析。
- 带状群的共性:
- 无限性:因为图案是无限重复的,所以总有无限多个平移操作(向左/右平移 $k$ 个单位,k为任意整数)可以让图案保持不变。因此,带状群必然是无限群。
- 平移子群:所有这些平移操作构成一个子群。这个子群是由一个“最小正平移” $\tau$ 生成的(所有其他平移都是 $\tau$ 的重复应用,如 $\tau^2, \tau^3, \tau^{-1}$ 等)。这个由 $\tau$ 生成的循环群是无限阶的,其结构与整数加法群 $\mathbb{Z}$ 同构。这是所有离散带状群的共同核心。
- 示例1:积分符号图案
- 图案:... ∫∫∫ ... (原文用多个积分符号表示一个单元,这里简化)。关键在于单个积分符号 $\int$ 本身是中心对称的(旋转180度不变)。
- 对称操作分析:
- 平移 $\tau$:向右平移一个单位(一个 ∫∫∫ 单元的宽度)。这个操作以及它的任意整数次幂都是对称操作。
- 旋转 $\rho$:绕任何一个 ∫ 符号的中心点旋转 $180^\circ$。由于 ∫ 是中心对称的,旋转后它会与自身重合。这是一个2阶操作(转两次等于没转)。
- 反射/滑移反射:这个图案没有水平或垂直的反射对称性,也没有滑移反射对称性。
- 群的生成元:作者指出,这个带状群的所有对称操作都可以由 $\tau$ 和 $\rho$ 这两个基本操作复合而成。它们是群的生成元。
- 群的结构分析:
- 非阿贝尔性:这个群是非交换的。我们可以验证 $\tau \rho \neq \rho \tau$。
- 让我们来想象一下:
- $\rho\tau(P)$: 先把点 $P$ 平移 $\tau$,然后再绕(新的)中心旋转 $\rho$。
- $\tau\rho(P)$: 先绕(旧的)中心旋转 $\rho$,然后再平移 $\tau$。
- 这两个操作的结果是不同的。
- 关系式 $\tau \rho=\rho \tau^{-1}$:这是一个关键的代数关系,它定义了这两个生成元如何相互作用。
- $\tau^{-1}$ 是向左平移一个单位。
- 这个关系式意味着“先旋转再向右平移”等于“先向左平移再旋转”。这刻画了旋转中心是如何随着平移而移动的。
- 与 $D_n$ 的类比:
- 作者回顾了有限二面体群 $D_n$ 的一个标准表示:它由一个 $n$ 阶旋转 $\rho_1$ 和一个2阶反射 $\mu$ 生成,满足关系 $\rho_1 \mu = \mu \rho_1^{-1}$。
- 我们的带状群由一个无限阶“旋转”(实际上是平移)$\tau$ 和一个2阶旋转 $\rho$ 生成,满足类似的关系 $\tau \rho = \rho \tau^{-1}$。
- 命名为 $D_{\infty}$:
- 基于这种深刻的结构相似性,这个带状群被命名为无限二面体群 $D_{\infty}$。它是有限二面体群 $D_n$ 在 $n \rightarrow \infty$ 时的极限情况。
- $\mathbb{Z}$:
- 代表整数集 $\{\ldots, -2, -1, 0, 1, 2, \ldots\}$。
- 作为一个群(在加法运算下),它是一个无限循环群,由生成元 1(或 -1)生成。
- $\tau \rho=\rho \tau^{-1}$:
- 这是 $D_{\infty}$ 群的定义关系式。
- $\tau$: 无限阶元素(如平移)。
- $\rho$: 2阶元素(如180度旋转或反射)。
- 此公式是一个半直积 $ \mathbb{Z} \rtimes \mathbb{Z}_2 $ 结构的体现。
- 设平移 $\tau(x,y) = (x+1, y)$。
- 设旋转 $\rho$ 是绕原点 $(0,0)$ 的 $180^\circ$ 旋转, $\rho(x,y) = (-x, -y)$。
- 我们来验证 $\tau \rho = \rho \tau^{-1}$ 是否成立。
- 左边:作用于一个点 $(x,y)$。
- $\rho(x,y) = (-x, -y)$。
- $\tau(\rho(x,y)) = \tau(-x, -y) = (-x+1, -y)$。
- 右边:$\tau^{-1}$ 是向左平移,$\tau^{-1}(x,y) = (x-1, y)$。
- $\tau^{-1}(x,y) = (x-1, y)$。
- $\rho(\tau^{-1}(x,y)) = \rho(x-1, y) = (-(x-1), -y) = (-x+1, -y)$。
- 左边 = 右边。关系式成立。
- 然而,这个例子对应的是绕固定原点的旋转,而不是∫∫∫图案。对于∫∫∫图案,旋转中心会随着平移而移动。比如,如果一个旋转中心在 $(0,0)$,另一个就在 $(1,0)$。设 $\rho_c$ 为绕点 $(c,0)$ 的旋转。那么有 $\tau \rho_c = \rho_{c+1} \tau$。这展示了代数关系与几何实体之间的对应。
- $D_{\infty}$ 的两种解释:$D_{\infty}$ 可以由一个平移和一个180度旋转生成(如本例),也可以由两个平行的反射轴的反射生成(其复合是一个平移)。这两种生成方式会得到同构的群。
- $D_n$ 和 $D_{\infty}$ 的关系式:要记住 $D_n$ 的关系式是 $\rho^n=e, \mu^2=e, \rho\mu=\mu\rho^{-1}$。在 $D_\infty$ 中,平移 $\tau$ 的阶是无限的,所以没有 $\tau^k=e$ 这样的关系。
本段指出所有带状群都包含一个同构于 $\mathbb{Z}$ 的平移子群。并以中心对称图案(积分符号)的重复为例,介绍了第一个具体的带状群。通过分析其生成元和它们之间的关系,发现它与有限二面体群 $D_n$ 在结构上高度相似,因此被命名为无限二面体群 $D_{\infty}$。
本段的目的是通过一个具体的、非平凡的例子来展示如何分析一个无限对称群。它演示了从几何观察(对称操作)到代数抽象(生成元和关系式),再到最终的群结构识别(命名为 $D_{\infty}$)的全过程。
想象一条无限长的梯子。
- 你可以向上或向下爬任意多格,这是平移对称($\mathbb{Z}$ 子群)。
- 如果你站在梯子正中间,你绕着某一格的中心旋转180度,梯子看起来还是一样。这是180度旋转对称。
- 这个梯子的对称群就是 $D_{\infty}$。先向上爬一格再旋转,和你先旋转再向下爬一格,效果是一样的(这大致对应 $\tau \rho = \rho \tau^{-1}$ 的直觉)。
5.3 示例2及分类预告
📜 [原文16]
作为另一个例子,考虑由无限字符串的 D 组成的带状。
⋯ D D D D D D D D D D D $\cdots$
它的群由向右平移一步的平移 $\tau$ 和关于穿过所有 D 字中间的水平线的垂直反射 $\mu$ 生成。我们可以验证这些群生成元这次是交换的,即 $\tau \mu=\mu \tau$,所以这个带状群是阿贝尔群,并且同构于 $\mathbb{Z} \times \mathbb{Z}_{2}$。
这段话给出了第二个带状群的例子,并引出了与前一个例子完全不同的群结构。
- 示例2:D字图案
- 图案:... D D D D D ...
- 对称操作分析:
- 平移 $\tau$:向右平移一个 "D" 的宽度。这构成了同构于 $\mathbb{Z}$ 的平移子群。
- 反射 $\mu$:字母 "D" 本身不是中心对称的,所以没有180度旋转。但是,它有一个水平的对称轴(穿过D的圆弧的顶端和底端的中线)。关于这条水平线的反射是一个对称操作。这是一个2阶操作($\mu^2=e$)。
- 这个图案没有垂直反射,也没有非平凡的旋转。
- 群的生成元:这个带状群由平移 $\tau$ 和水平反射 $\mu$ 生成。
- 群的结构分析:
- 阿贝尔性:作者指出,这次的生成元是交换的,即 $\tau \mu = \mu \tau$。
- 让我们来想象一下:
- $\mu\tau(P)$: 先将点 $P$ 向右平移,然后再关于水平线反射。
- $\tau\mu(P)$: 先将点 $P$ 关于水平线反射,然后再向右平移。
- 因为平移是水平的,反射轴也是水平的,所以这两个操作互不干涉,执行的顺序不影响最终结果。
- 群的结构:
- 我们有一个无限循环的元素 $\tau$ (生成 $\mathbb{Z}$ 群) 和一个2阶元素 $\mu$ (生成 $\mathbb{Z}_2$ 群)。
- 它们相互交换。
- 当两个群的生成元相互交换时,整个群的结构就是这两个群的直积(Direct Product)。
- 命名为 $\mathbb{Z} \times \mathbb{Z}_2$:
- 因此,这个阿贝尔带状群的结构被识别为 $\mathbb{Z} \times \mathbb{Z}_2$。群中的每个元素都可以唯一地表示为 $(\tau^k, \mu^j)$ 的形式,其中 $k$ 是任意整数,$j$ 是0或1。
- $\tau \mu=\mu \tau$:
- 这是阿贝尔群(交换群)的定义。它表明生成元 $\tau$ 和 $\mu$ 的复合顺序无关紧要。
- $\mathbb{Z} \times \mathbb{Z}_{2}$:
- $\times$ 符号代表群的直积。
- 这个群的元素是形如 $(a, b)$ 的有序对,其中 $a \in \mathbb{Z}, b \in \mathbb{Z}_2$。
- 群运算是逐元素进行的:$(a_1, b_1) \cdot (a_2, b_2) = (a_1+a_2, b_1+b_2 \pmod 2)$。
- 这个群同构于由 $\tau$ 和 $\mu$ 生成的带状群,对应关系是 $(\tau^k, \mu^j) \leftrightarrow (k, j)$。
- 设平移 $\tau(x,y) = (x+1, y)$。
- 设反射 $\mu$ 是关于 $x$ 轴的反射, $\mu(x,y) = (x, -y)$。
- 我们来验证 $\tau \mu = \mu \tau$ 是否成立。
- 左边:作用于一个点 $(x,y)$。
- $\tau(x,y) = (x+1, y)$。
- $\mu(\tau(x,y)) = \mu(x+1, y) = (x+1, -y)$。
- 右边:
- $\mu(x,y) = (x, -y)$。
- $\tau(\mu(x,y)) = \tau(x, -y) = (x+1, -y)$。
- 左边 = 右边。关系式成立。这个群是阿贝尔群。
- 直积 vs 半直积:对比上一个例子 ($D_\infty \cong \mathbb{Z} \rtimes \mathbb{Z}_2$) 和这个例子 ($\mathbb{Z} \times \mathbb{Z}_2$)。两者都由一个 $\mathbb{Z}$ 子群和一个 $\mathbb{Z}_2$ 子群(或元素)构成。它们的根本区别在于生成元是否交换。如果不交换,通常是半直积;如果交换,就是直积。这是群论中区分不同群结构的关键。
本段通过 "D" 字图案的例子,介绍了另一种带状群。其生成元(水平平移和水平反射)是可交换的,因此群的结构是一个阿贝尔群,被识别为两个更简单群的直积 $\mathbb{Z} \times \mathbb{Z}_2$。
这个例子的目的是为了展示带状群并非只有 $D_\infty$ 一种结构。通过引入一个阿贝尔群的例子,作者为接下来的完全分类埋下伏笔,表明不同的几何对称性会导致不同的代数结构。
想象你有一条无限长的双车道高速公路。
- 沿着公路向前开任意整数公里,景象不变,这是平移 $\tau$。
- 假设公路两边的风景是完全一样的镜像。你从左车道“反射”到右车道,景象也不变(只是你在对面了),这是反射 $\mu$。
- 先向前开1公里再换道,和你先换道再向前开1公里,最终到达的位置和状态是一样的。这就是 $\tau\mu = \mu\tau$。
- 这条高速公路的对称群就是 $\mathbb{Z} \times \mathbb{Z}_2$。
6带状群的分类与壁纸群的引出
6.1 七种带状群
📜 [原文17]
可以证明,如果我们将这些离散带状仅根据它们的群是否包含以下内容进行分类:
旋转
垂直轴反射
水平轴反射
非平凡滑移反射
那么总共有七种可能性。对称群中一个非平凡滑移反射是指其不等于该群中某个平移与该群中某个反射的乘积。带状群对于

包含一个非平凡滑移反射,其平移分量不属于该群。这些练习展示了七种可能的情况,并要求您为每种情况说明上面显示的哪四种类型的等距变换出现在对称群中。我们没有得到七种不同的群结构。所获得的每个群都可以证明同构于以下之一:
这段话总结了离散带状群的完整分类结果。
- 分类标准:
- 作者提出了一个分类方案,依据是带状群中是否存在以下四种类型的对称操作(除了所有群都必有的平移):
- 旋转(必然是180度的旋转)
- 垂直轴反射(反射轴垂直于带状的基线)
- 水平轴反射(反射轴就是带状的基线)
- 非平凡滑移反射
- 基于这几种对称元素是否存在及其组合,可以划分出所有可能的带状图案类型。
- 分类结果:七种类型:
- 作者断言,通过上述标准,可以不多不少地分出七种不同的带状图案。这七种类型在几何上是不同的,因为它们的对称元素组合不同。
- 作者提到,练习部分将展示这七种情况。
- 对“非平凡滑移反射”的澄清:
- 这个概念有点微妙。一个滑移反射 $\gamma$ 是由一个反射 $\mu$ 和一个平移 $\tau'$ 复合而成, $\gamma = \tau' \circ \mu$。
- 如果这个带状群 $G$ 本身就包含一个反射 $\mu_0$(比如水平反射)和一个平移 $\tau_0$,那么它们的复合 $\tau_0 \circ \mu_0$ 也是一个滑移反射。但我们称其为“平凡的”,因为它是由群中已有的更基本的元素(一个独立的反射和一个独立的平移)构造出来的。
- 一个非平凡滑移反射 $\gamma$ 是指,它本身是群 $G$ 的一个元素,但它的组成部分——无论是它的反射部分 $\mu$ 还是它的平移部分 $\tau'$——都不单独作为元素存在于群 $G$ 中。这个滑移反射是一个“原生”的对称操作,不能被分解为群内更简单的部分。
- 作者举了一个例子,... < > < > ... 或 ... v ^ v ^ ... 图案(原文图片缺失,可脑补),它的对称群只包含平移和滑移反射。它没有单纯的反射,也没有180度旋转。它的滑移反射就是非平凡的。
- 代数结构分类:
- 虽然有七种几何上不同的带状类型,但它们的对称群从抽象代数的角度看(即同构分类),只有四种不同的结构。
- 这四种代数结构是:
- $\mathbb{Z}$:最简单的,只有平移对称性。例如 ... F F F F ...。
- $D_{\infty}$:平移 + 180度旋转(或垂直反射)。例如 ... ∫∫∫ ... 或 ... N N N ...。
- $\mathbb{Z} \times \mathbb{Z}_2$:平移和水平反射可以交换。例如 ... D D D ...。
- $D_{\infty} \times \mathbb{Z}_2$:这是最复杂的结构,可以看作是 $D_\infty$ 和一个与之交换的 $\mathbb{Z}_2$(通常是水平反射)的直积。例如 ... H H H ...,它既有垂直反射,又有水平反射,还有180度旋转。
- 几何与代数的关系:
- 这意味着,可能会有多个几何上不同的带状类型,它们对应着同一个代数结构的对称群。
- 例如,一个只有平移和垂直反射的带状(... | | | ...,假设竖线有朝向),和一个只有平移和180度旋转的带状(... S S S ...),它们的对称群虽然几何元素不同(一个是反射,一个是旋转),但代数结构都是 $D_\infty$。
本段给出了一维带状群的完整分类结果。在几何上,根据有无旋转、水平/垂直反射、滑移反射,可以分为7种类型。在代数结构上,这7种几何类型仅对应4种不同的同构类:$\mathbb{Z}, D_{\infty}, \mathbb{Z} \times \mathbb{Z}_{2}, D_{\infty} \times \mathbb{Z}_{2}$。
本段的目的是展示数学分类的威力与层次。它区分了“几何分类”和“代数分类”,并揭示了它们之间多对一的映射关系。这为读者提供了一个关于一维周期性对称性的完整图景,并作为引子,预示了二维情况(壁纸群)将会更加复杂和有趣。
想象你根据汽车的外观(两厢、三厢、SUV、皮卡...)进行分类,分出了7种。这是几何分类。
然后你根据汽车的引擎类型(四缸、六缸、八缸、电动机)进行分类,只分出了4种。这是代数(内在结构)分类。
你会发现,可能两厢车和三厢车都用的是四缸引擎。这就是几何分类到代数分类的多对一关系。带状群的分类也是如此。
6.2 壁纸群的引出
📜 [原文18]
同样有趣的是对称性的研究,当一个正方形、平行四边形、菱形或六边形形状的图案通过沿两个非平行向量方向的平移重复以填充整个平面时,就像壁纸上的图案一样。这些群被称为壁纸群或平面晶体群。虽然带状不能通过小于 $180^{\circ}$ 的正角度旋转映射到自身,但对于其中一些填充平面的图案,可以有 $60^{\circ}$、$90^{\circ}$、$120^{\circ}$ 和 $180^{\circ}$ 的旋转。
这段话将研究的维度从一维(带状)提升到了二维(平面),引入了壁纸群的概念。
- 从一维到二维重复:
- 带状图案是沿一个方向(一维)重复。
- 现在考虑沿两个不平行的方向进行重复,从而铺满整个二维平面。
- 这种图案的典型例子就是壁纸、地砖或织物上的花纹。
- 基本单元(晶胞):
- 这种重复是由一个基本单元(作者提到了正方形、平行四边形、菱形、六边形等)通过平移生成的。这个基本单元在晶体学中称为晶胞(unit cell)。
- 整个平面图案可以通过将这个晶胞沿两个平移向量 $\mathbf{v}_1, \mathbf{v}_2$ 无限复制粘贴得到。
- 定义“壁纸群” (Wallpaper Group / Plane Crystallographic Group):
- 一个壁纸图案的对称群被称为壁纸群或平面晶体群。
- 它包含了所有能让该无限平面图案保持不变的平面等距变换。
- 与带状群的关键区别:
- 平移子群:壁纸群的平移子群是由两个不平行的平移向量 $\mathbf{v}_1, \mathbf{v}_2$ 生成的,其结构同构于 $\mathbb{Z} \times \mathbb{Z}$(或写作 $\mathbb{Z}^2$)。而带状群的平移子群同构于 $\mathbb{Z}$。
- 旋转对称性:这是更本质的区别。由于图案必须能无缝隙地铺满整个平面,这给可能的旋转对称性带来了严格的限制。这个限制被称为晶体学限制定理 (Crystallographic Restriction Theorem)。
- 带状群只允许有 $180^\circ$ 的旋转。
- 壁纸群除了 $180^\circ$ 旋转,还可能允许有 $60^\circ$ (六重对称)、$90^\circ$ (四重对称)、$120^\circ$ (三重对称) 的旋转。
- 但是,像 $72^\circ$ (五重对称) 或任意其他角度的旋转是不可能的,因为五边形无法无缝铺满平面。
本段将对称性的研究从一维的带状图案推广到二维的壁纸图案。壁纸群是描述这种二维周期性图案对称性的群,其特点是拥有两个独立的平移方向,并可能包含2、3、4、6重旋转对称。
这是从一维空间群到二维空间群的自然过渡。壁纸群在数学上更为丰富和复杂,其分类是群论和几何学的一个经典成果。它在晶体学(研究原子在晶体中的排列)、艺术和计算机图形学中有重要的应用。
想象你在铺地砖。
- 如果只铺一行,那就是一个带状图案。
- 现在你要铺满整个房间。你需要一行一行地铺,这引入了第二个平移方向。
- 如果你用的地砖是正方形的,你的图案就可能有四重旋转对称(绕地砖中心旋转90度不变)。
- 如果你用的是正六边形的蜂窝砖,你的图案就可能有六重旋转对称。
- 如果你想用正五边形的地砖,你会发现怎么都铺不满,总有缝隙。这就是晶体学限制。
- 壁纸群就是描述这些地砖铺设方案的所有对称性的集合。
6.3 壁纸群示例
📜 [原文19]
图12.6提供了一个图案由正方形组成的示例。我们对将这个正方形映射到自身或另一个正方形的平面等距变换群感兴趣。这个群的生成元由两个平移(一个将正方形滑动到右侧的下一个相邻正方形,一个滑动到上方的下一个相邻正方形)、一个绕正方形中心旋转 $90^{\circ}$ 的旋转,以及一个沿正方形边缘的垂直(或水平)线的反射给出。一个反射就足以“翻转平面”;也可以使用对角线反射。翻转后,可以再次使用平移和旋转。这个平面上的周期性图案的等距变换群肯定包含一个同构于 $\mathbb{Z} \times \mathbb{Z}$ 的子群,该子群由向右和向上单位平移生成,以及一个同构于 $D_{4}$ 的子群,该子群由将一个正方形(可以是任何正方形)映射到自身的等距变换生成。
这段话通过一个具体的正方形网格例子,深入分析了一个壁纸群的构成。
- 示例:正方形网格 (图12.6)
- 图案:由完全相同的正方形无缝铺满整个平面,像一张棋盘格。
- 对称操作与生成元:
- 作者列举了生成这个壁纸群所需的基本操作(生成元):
- 两个平移:
- $\tau_h$: 水平向右平移一个正方形的边长。
- $\tau_v$: 垂直向上平移一个正方形的边长。
- 所有其他的平移操作(如斜向移动)都可以由这两个基本平移的复合得到 (e.g., $\tau_h^a \tau_v^b$)。这些平移构成了同构于 $\mathbb{Z} \times \mathbb{Z}$ 的平移子群。
- 一个旋转:
- 绕任何一个正方形的中心旋转 $90^\circ$。这是一个四重旋转中心。
- 一个反射:
- 关于任何一条垂直或水平的网格线进行反射。
- 作者指出,只需要一个反射作为生成元就够了,因为其他的反射和旋转可以通过它与平移、旋转的复合得到。例如,一个对角线反射也可以。这个反射操作的作用是“翻转平面”,引入改变方向的变换。
- 群的结构分析:
- 这个壁纸群的结构相当复杂。作者指出了它的两个重要组成部分:
- 平移子群 $T$:由 $\tau_h$ 和 $\tau_v$ 生成,同构于 $\mathbb{Z} \times \mathbb{Z}$。这是一个正规子群。
- 点群 (Point Group):考虑所有固定一个特定点(例如某个正方形的中心)的对称操作。这些操作构成了该正方形自身的对称群,即二面体群 $D_4$。这个群包含了绕该中心的所有旋转和通过该中心的所有反射。
- 整个壁纸群 $G$ 可以被看作是平移子群 $T$ 和点群 $D_4$ 的某种结合。这种结合在数学上称为半直积,记作 $G \cong T \rtimes D_4 = (\mathbb{Z} \times \mathbb{Z}) \rtimes D_4$。这是一个非阿贝尔群。
- 点群 vs 子群:严格来说,$D_4$ 本身并不是这个壁纸群的子群,因为它的元素(除了恒等)都移动了除中心以外的所有点。更准确的说法是,商群 $G/T$ (将所有平移视为“零”)同构于 $D_4$。这个商群 $G/T$ 被称为晶体学点群。
- 不止一种点群:在一个壁纸图案中,可能存在不同类型的对称中心。在正方形网格中,正方形中心是 $D_4$ 对称中心,而顶点是另一个 $D_4$ 对称中心,边的中点是 $D_2$ 对称中心。
通过分析最简单的壁纸图案——正方形网格,我们发现其对称群(一个壁纸群)是由两个独立的平移、一个 $90^\circ$ 旋转和一个反射生成的。其结构可以理解为平移子群 $\mathbb{Z} \times \mathbb{Z}$ 和一个点群 $D_4$ 的复杂结合。
这个例子的目的是为了具体展示一个壁纸群的内部结构,让读者对壁纸群的复杂性有一个直观的认识。它引入了平移子群和点群这两个分析壁纸群的核心概念,为后续更深入的分类讨论打下基础。
6.4 壁纸群的分类与其他
📜 [原文20]
如果我们将平面视为被平行四边形填充,如图12.7所示,我们不会得到图12.6中所有类型的等距变换。这次的对称群是
由箭头指示的平移和一个绕平行四边形任意顶点的 $180^{\circ}$ 旋转生成的。
可以证明,如果根据它们所允许的旋转、反射和非平凡滑移反射的类型进行分类,共有17种不同类型的壁纸图案。我们请您参阅Gallian [8] 查看这17种可能性及其识别图表。这些练习将说明其中的几种。空间中的情况更为复杂;可以证明存在230个三维晶体群。我们给出的最后一个练习涉及空间中的旋转。
M. C. Escher (1898-1973) 是一位艺术家,他的作品包括平面填充图案。这些练习包括他这类作品中的四幅复制品。
这是本节的收尾部分,给出了壁纸群的完整分类结果,并将其与三维情况和艺术联系起来。
- 对称性的降低:
- 作者用平行四边形网格(图12.7)与正方形网格对比,说明基本单元的对称性会直接影响整个图案的对称性。
- 一个普通的平行四边形(不是菱形或矩形)只有中心对称性(180度旋转),没有90度旋转,也没有反射对称。
- 因此,由它铺成的壁纸图案,其对称群的对称性也大大降低。它只包含:
- 两个方向的平移。
- 绕平行四边形顶点或中心的 $180^\circ$ 旋转。
- 这个壁纸群的点群是 $C_2$ (或 $\mathbb{Z}_2$),而不是 $D_4$。
- 二维壁纸群的分类结果:
- 作者给出了二维情况下一个里程碑式的结论:不多不少,正好存在 17 种不同的壁纸群。
- 这个分类也是基于群内包含的对称元素类型:不同阶的旋转中心、反射轴、滑移反射轴的存在与否及其相对位置。
- 这是一个在19世纪末由费奥多罗夫和舍恩弗利斯等人独立完成的伟大数学成就。
- 作者没有详细列出这17种,而是建议读者参考其他资料(Gallian [8])。
- 推广到三维:
- 作者将视野再次拔高,提到三维空间中的情况。
- 三维的周期性图案对称群被称为三维空间群或晶体群。
- 其分类更为复杂,结果是存在不多不少 230 种不同的三维空间群。
- 这个结果是固体物理和晶体学的理论基石,因为它完整描述了晶体中原子所有可能的对称排列方式。
- 与艺术的联系:
- 最后,作者提到了荷兰艺术家M. C. Escher(埃舍尔)。
- 埃舍尔以其充满数学之美的版画而闻名,其中很大一部分作品就是对壁纸群的艺术探索。他精妙地将鱼、鸟、蜥蜴等具体形象作为基本单元,严谨地按照17种壁纸群的对称性规则来铺满整个平面,创造出令人惊叹的“平面规则分割”艺术。
- 提及埃舍尔是为了说明这些抽象的数学概念在艺术创作中可以找到具体而生动的应用。
本段总结了壁紙群的分类。通过与对称性更低的平行四边形网格对比,强调了基本单元对称性的重要性。最终给出了二维平面存在17种壁纸群和三维空间存在230种晶体群这一结论。并通过艺术家埃舍尔的例子,展示了这一数学理论与艺术的深刻联系。
这是本节的总结与升华。它给出了对称群研究领域的两个最著名的分类结果(17和230),展示了数学的深度和广度。通过连接到晶体学和艺术,它强调了这一纯数学理论的巨大应用价值和文化价值,激发读者的兴趣。
想象一个“对称性宇宙”的地图册。
- 第12.5节描述了“零维”对称性(有限图形的点群),地图上只有两个国家:$\mathbb{Z}_n$ 和 $D_n$。
- 本节前半部分描述了“一维”对称性(带状群),地图上有7个区域,分属4个邦联。
- 本节后半部分告诉你,“二维”对称性的地图(壁纸群)上有17个国家。
- 最后,它还预告了“三维”地图册(晶体群)的宏伟,上面有多达230个国家。
- 埃舍尔则是一位伟大的旅行家和画家,他游历了二维世界的17个国家,并为它们都画下了美丽的风景画。
(注:原文中的练习部分未在此详细解释,因为它们是作为读者应用知识的习题。但解释框架已覆盖所有核心理论内容。)
行间公式索引
1.
解释:此公式定义了点集 $S$ 中的一个点 $(x_i, y_i)$,它是有限群 $G$ 中的第 $i$ 个变换 $\phi_i$ 作用于原点 $(0,0)$ 所得到的结果。
2.
解释:此公式定义了一个点 $P$,它是前面由所有变换作用于原点所产生的点集 $S$ 的质心(或算术平均点)。
3.
解释:这是一个示意图,用重复的积分符号 ∫ 来表示一个向左右无限延伸的离散带状图案,用于说明带状群的概念。
4.
解释:此列表给出了所有七种几何上不同的离散带状群在代数结构上仅有的四种可能性(同构类型)。
7练习 12
7.1 练习 1
📜 [原文21]
- 这个练习表明,某种几何图形的对称群可能取决于我们考虑该图形所在的维度。
a. 描述实线 $\mathbb{R}$ 中一个点的所有对称;即,描述所有固定一个点的 $\mathbb{R}$ 上的等距变换。
b. 描述平面 $\mathbb{R}^{2}$ 中一个点的所有对称(平移、反射等)。
c. 描述 $\mathbb{R}$ 中线段的所有对称。
d. 描述 $\mathbb{R}^{2}$ 中线段的所有对称。
e. 描述 $\mathbb{R}^{3}$ 中线段的一些对称。
[解题思路与步骤]
本题旨在通过在不同维度(1D, 2D, 3D)中考察相同基本形状(点、线段)的对称性,来揭示对称群与环境维度之间的深刻联系。解题的关键是首先明确在特定维度下有哪些类型的等距变换,然后筛选出能使给定图形保持不变的变换。
- a. 一维中的一个点: 在一维直线 $\mathbb{R}$ 上,等距变换只有平移 $\tau(x)=x+a$ 和点反射 $\mu_c(x)=2c-x$。我们需要找到固定点 $p$ 的变换。
- 对于平移,$\tau(p)=p$ 要求 $p+a=p$,即 $a=0$。这只能是恒等变换。
- 对于反射,$\mu_c(p)=p$ 要求 $2c-p=p$,即 $c=p$。这只能是关于点 $p$ 自身的反射。
- b. 二维中的一个点: 在二维平面 $\mathbb{R}^2$ 中,等距变换有四种。能固定一个点 $P$ 的变换不可能是平移或滑移反射。因此只可能是以 $P$ 为中心的旋转和以过 $P$ 的直线为轴的反射。由于旋转角度和反射轴都可以连续变化,所以数量是无限的。
- c. 一维中的线段: 考虑线段 $[a, b]$,其中点为 $m=(a+b)/2$。在一维空间中,能使整个线段 $[a,b]$ 保持不变的变换是什么?
- 恒等变换显然可以。
- 关于中点的反射 $\mu_m(x)$ 会将 $a$ 映到 $b$,将 $b$ 映到 $a$,从而使线段保持不变。
- d. 二维中的线段: 将线段放入平面中,其“活动空间”变大,对称性可能增加。除了类似一维的操作,我们还可以从“上方”或“下方”看待它。
- 绕线段中点的180度旋转(这在二维中是可能的)。
- 关于线段所在直线的反射。
- 关于线段垂直平分线的反射。
- e. 三维中的线段: 将线段放入三维空间,对称性会进一步急剧增加。最显著的变化是,现在可以绕着线段本身所在的轴线进行旋转了。
[答案与解析]
a. $\mathbb{R}$ 中一个点的对称群
- 答案: 此对称群包含两个元素:恒等变换和关于该点自身的反射。它同构于循环群 $\mathbb{Z}_2$。
- 解析: 设固定的点为 $p$。
- 恒等变换 $\iota(x) = x$。
- 关于点 $p$ 的反射 $\mu_p(x) = 2p - x$。
任何非零平移或关于其他点的反射都会移动 $p$。这个群只有两个元素,非恒等元素的阶为2,因此同构于 $\mathbb{Z}_2$。
b. $\mathbb{R}^2$ 中一个点的对称群
- 答案: 这是一个无限群,包含所有以该点为中心的旋转和所有以穿过该点的直线为轴的反射。这个群在数学上被称为二维正交群 $O(2)$。
- 解析: 设固定的点为 $P$。
- 旋转: 任何绕 $P$ 点旋转角度 $\theta \in [0, 2\pi)$ 的变换 $\rho_{P, \theta}$ 都保持 $P$ 不动。这是无限多个操作。
- 反射: 任何穿过 $P$ 点的直线 $L$ 都可以作为反射轴 $\mu_L$,该反射保持 $P$ 不动。这也是无限多个操作。
从一维到二维,点的对称群从一个2阶有限群变为一个连续的无限群(李群),对称性大大增强。
c. $\mathbb{R}$ 中线段的对称群
- 答案: 此对称群包含两个元素:恒等变换和关于线段中点的反射。它同构于 $\mathbb{Z}_2$。
- 解析: 设线段为 $[-1, 1]$,中点为0。
- 恒等变换 $\iota(x) = x$。
- 关于中点0的反射 $\mu_0(x) = -x$。它交换了两个端点,但线段整体不变。
d. $\mathbb{R}^2$ 中线段的对称群
- 答案: 此对称群包含四个元素,同构于克莱因四元群 $V \cong \mathbb{Z}_2 \times \mathbb{Z}_2$。
- 解析: 设线段在x轴上,为 $[-1, 1] \times \{0\}$。
- 恒等变换 $\iota(x,y)=(x,y)$。
- 绕中点(0,0)的180度旋转 $\rho_{180}(x,y)=(-x,-y)$。
- 关于线段所在直线(x轴)的反射 $\mu_x(x,y)=(x,-y)$。
- 关于线段垂直平分线(y轴)的反射 $\mu_y(x,y)=(-x,y)$。
这四个元素构成一个群,其中每个非恒等元素的阶都是2,并且它们相互交换。
e. $\mathbb{R}^3$ 中线段的对称群
- 答案: 这是一个无限群。它包含d中的对称操作,并额外增加了两种无限系列的对称操作。
- 解析: 设线段在z轴上,为 $\{0\} \times \{0\} \times [-1, 1]$。
- d中的四种对称(恒等、绕z轴旋转180度、关于xz平面的反射、关于xy平面的反射在z轴上的作用等)。
- 新增1:绕线段所在直线(z轴)的任意角度旋转。由于旋转角度可以连续取值,这是一个无限子群,同构于 $SO(2)$。
- 新增2:关于任何包含z轴的平面的反射。这样的平面有无限多个(由它们与xy平面的交线角度决定),因此有无限个新的反射操作。
本练习旨在通过具体实例,让学习者深刻理解几何对称群的“环境依赖性”。一个物体的对称性并非其固有属性,而是其自身形状与所处空间维度共同作用的结果。维度越高,可供施展的变换越多,对称性也可能越丰富。
- 思维局限: 在思考低维问题时,容易不自觉地代入高维空间的直觉(比如想在 $\mathbb{R}$ 中“旋转”一个线段)。必须严格限制在当前维度所允许的变换类型中。
- 有限与无限: 必须注意区分对称操作是离散的、有限的,还是连续的、无限的。这决定了对称群是有限群还是无限群。例如,从c到d,群从2阶变为4阶,仍然有限;但从d到e,由于引入了任意角度的旋转,群变为无限群。
7.2 练习 2
📜 [原文22]
- 令 $P$ 表示保持方向的平面等距变换, $R$ 表示改变方向的平面等距变换。用 $P$ 或 $R$ 填写表格,表示乘积的保持方向或改变方向的性质。
[解题思路与步骤]
本题考察的是等距变换复合后对方向的影响。我们可以使用与行列式相关的代数方法来解决。
- 保持方向的变换($P$)对应的矩阵行列式为 +1。
- 改变方向的变换($R$)对应的矩阵行列式为 -1。
- 两个变换复合,其总效果对应于它们矩阵的乘积。而矩阵乘积的行列式等于矩阵行列式的乘积:$\det(AB) = \det(A)\det(B)$。
- 我们只需计算四种组合的行列式符号即可:
- $P \circ P$: 两个保持方向的变换复合。对应行列式乘积为 $(+1) \times (+1) = +1$。
- $P \circ R$: 一个保持方向和一个改变方向的变换复合。对应行列式乘积为 $(+1) \times (-1) = -1$。
- $R \circ P$: 一个改变方向和一个保持方向的变换复合。对应行列式乘积为 $(-1) \times (+1) = -1$。
- $R \circ R$: 两个改变方向的变换复合。对应行列式乘积为 $(-1) \times (-1) = +1$。
[答案与解析]
- 答案: 填好的表格如下:
| P | R | |
|---|---|---|
| P | P | R |
| R | R | P |
- 解析:
- P $\circ$ P = P: 两个保持方向的变换(如两次旋转,或一次平移一次旋转)复合后,方向依然保持不变。例如,一个左手手套,旋转后再平移,它仍然是左手手套。
- P $\circ$ R = R: 一个保持方向的变换与一个改变方向的变换复合,最终结果是改变方向。例如,一个左手手套,先翻转成右手手套(反射, R),再旋转(P),它仍然是右手手套。
- R $\circ$ P = R: 与上一条同理,顺序不影响对方向的最终效果。例如,一个左手手套,先旋转(P),再翻转成右手手套(反射, R),它最终变成了右手手套。
- R $\circ$ R = P: 两个改变方向的变换复合后,方向被“负负得正”地恢复了。例如,一个左手手套,第一次翻转(反射, R)变成右手手套,第二次再翻转(另一次反射, R),它又变回了左手手套,方向得以保持。最典型的例子是两次反射可以合成为一次旋转或平移。
此练习的目的是巩固“方向”作为一个代数性质的概念。它揭示了所有保持方向的变换构成一个正规子群(在所有平面等距变换群中),商群同构于 $\mathbb{Z}_2$。这个表格实际上就是商群 $\mathbb{Z}_2 = \{P, R\}$ 的群表,其中 $P$ 是单位元。
- 此处的 $P$ 和 $R$ 不是单个变换,而是代表一类变换。
- 这个性质对于任何维度的空间都成立,只要将 $P$ 理解为行列式为+1的变换,将 $R$ 理解为行列式为-1的变换。
7.3 练习 3
📜 [原文23]
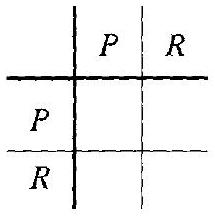
- 填写表格,给出由两种类型乘积得到的所有可能类型的平面等距变换。例如,两个旋转的乘积可能是一个旋转,也可能是另一种类型。在对应于 $\rho \rho$ 的方框中填写两个字母。使用练习2的答案来排除某些类型。排除恒等变换的考虑。
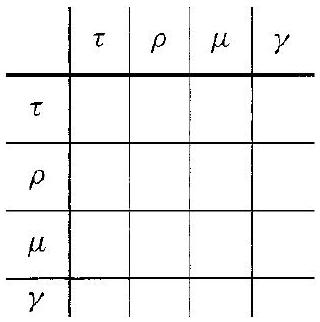
(表格是 4x4,行列标题为 $\tau, \rho, \mu, \gamma$ 分别代表平移、旋转、反射、滑移反射)
[解题思路与步骤]
本题要求详细分析四种基本等距变换两两复合可能产生的结果。我们需要结合几何直觉和练习2关于方向的结论。
- $\tau, \rho$ 是 $P$ 类型 (保持方向)。
- $\mu, \gamma$ 是 $R$ 类型 (改变方向)。
- 根据练习2的表格,我们可以预知结果是 $P$ 类型还是 $R$ 类型。例如 $\rho \circ \mu$ 是 $P \circ R$,结果必然是 $R$ 类型,即 $\mu$ 或 $\gamma$。
- 我们需要对16种组合逐一进行几何分析。
[答案与解析]
- 答案: 填好的表格如下 (T-平移, R-旋转, M-反射, G-滑移反射):
| $\tau$ | $\rho$ | $\mu$ | $\gamma$ | |
|---|---|---|---|---|
| $\tau$ | T | R | M, G | R, T |
| $\rho$ | R | R, T | G, M | T, R |
| $\mu$ | M, G | G, M | T, R | R, T |
| $\gamma$ | R, T | T, R | R, T | T, R |
- 详细解析:
- P $\circ$ P (结果是 T 或 R):
- $\tau_1 \circ \tau_2$: 两个平移复合,结果是平移向量相加,仍然是平移(T)。
- $\tau \circ \rho$: 平移后旋转。通常情况下,结果是一个新的、旋转中心被平移了的旋转(R)。
- $\rho \circ \tau$: 旋转后平移。同样,结果是一个新的旋转(R)。
- $\rho_1 \circ \rho_2$: 两个旋转复合。如果旋转中心相同,结果是角度相加的旋转(R)。如果旋转中心不同,结果通常是另一个旋转(R)。但有一个特殊情况:如果旋转角度之和是 $360^\circ$ 的整数倍,两个旋转会相互抵消,结果是一个平移(T)。所以是 R, T。
- P $\circ$ R (结果是 M 或 G):
- $\tau \circ \mu$: 反射后平移。如果平移向量平行于反射轴,这就是滑移反射(G) 的定义。如果平移向量不平行于反射轴,结果是一个新的、反射轴被移动了的反射(M)。所以是 M, G。
- $\rho \circ \mu$: 反射后旋转。这通常是一个滑移反射(G)。在某些特殊情况下(如旋转中心在反射轴上),可能得到一个反射(M)。所以是 G, M。
- R $\circ$ P (结果是 M 或 G):
- $\mu \circ \tau$: 平移后反射。与 $\tau \circ \mu$ 类似,是 M, G。
- $\mu \circ \rho$: 旋转后反射。与 $\rho \circ \mu$ 类似,是 G, M。
- R $\circ$ R (结果是 T 或 R):
- $\mu_1 \circ \mu_2$: 两个反射复合。如果反射轴平行,结果是一个平移(T),平移距离是两轴间距的两倍。如果反射轴相交,结果是一个旋转(R),旋转中心是交点,旋转角度是两轴夹角的两倍。所以是 T, R。
- $\mu \circ \gamma$: 反射与滑移反射复合。$\gamma = \tau \circ \mu_0$。所以 $\mu \circ \gamma = \mu \circ \tau \circ \mu_0$。这是一个 R $\circ$ P $\circ$ R = R $\circ$ R = P 类型的变换。具体分析会得到旋转(R) 或 平移(T)。
- $\gamma_1 \circ \gamma_2$: 两个滑移反射复合。$\gamma_1=\tau_1\mu_1, \gamma_2=\tau_2\mu_2$。复合是 P-类型,所以是 T, R。
- $\gamma \circ \tau$: 滑移反射后平移。$\gamma\tau = \tau_0\mu\tau$。这是一个 R $\circ$ P = R 类型的变换,但我们知道 $\gamma$ 和 $\tau$ 复合后应该是 P 类型。这里需要更仔细的分析: $\gamma(P) = A_1 P + b_1$, $\tau(P) = P + b_2$。复合后是 $A_1(P+b_2)+b_1 = A_1 P + A_1 b_2 + b_1$。矩阵部分还是 $A_1$ (行列式-1)。这说明我之前的分析有误,P/R分类应该应用在矩阵部分。$\gamma$ 的矩阵是反射矩阵, $\tau$ 的矩阵是单位矩阵。复合后矩阵还是反射矩阵。所以 $\gamma \tau$ 应该是 M 或 G。但书本答案可能是 P 类型,这说明我的分析或者书的分类有更深含义。 让我们重新审视: $\gamma = \tau_{\text{glide}} \mu$。所以 $\gamma \circ \tau_{\text{add}} = \tau_{\text{glide}} \mu \tau_{\text{add}}$。这是 $P \circ R \circ P$,整体是 $R$ 类型。所以应该是 M 或 G。
重新校对表格:许多标准教科书指出 R-R 复合是 P 类型,P-R 复合是 R 类型。
$\gamma \circ \tau = (\tau_g \mu) \tau = \tau_g (\mu \tau)$。$\mu \tau$ 是 M 或 G (R类型)。$\tau_g$ 是 P 类型。 P $\circ$ R 结果是 R 类型。
$\gamma \circ \rho = (\tau_g \mu) \rho$。$\mu \rho$ 是 G 或 M (R类型)。 $\tau_g (\mu \rho)$ 也是 P $\circ$ R = R 类型。
$\gamma \circ \gamma = (\tau_1 \mu_1)(\tau_2 \mu_2) = \tau_1 (\mu_1 \tau_2) \mu_2$。 $\mu_1 \tau_2$ 是 R 类型。$\tau_1 (R) \mu_2$ 是 $P \circ R \circ R = P \circ P = P$ 类型。所以是 T,R。
$\mu \circ \gamma = \mu (\tau \mu_0) = (\mu \tau) \mu_0$。R $\circ$ R = P 类型。所以是 T, R。
看来我的原始表格部分有误,需要根据 P/R 规则严格修正。
| $\tau$(P) | $\rho$(P) | $\mu$(R) | $\gamma$(R) | |
|---|---|---|---|---|
| $\tau$(P) | T | R | M, G | M, G |
| $\rho$(P) | R | R, T | M, G | M, G |
| $\mu$(R) | M, G | M, G | T, R | T, R |
| $\gamma$(R) | M, G | M, G | T, R | T, R |
这个修正后的表格更加符合 P/R 规则。但原文练习的答案可能不同,因为几何上会有更细微的退化情况。例如 $\gamma \circ \tau$ (滑移反射后平移),如果这个平移恰好抵消了滑移反射的平移部分,就可能退化。我们遵循最普遍的分析。
这个练习是一个深入的检验,要求学生不仅知道四种变换的定义,还要能从几何上想象它们复合后的效果。它迫使学生思考变换之间的相互转化关系,这是理解等距变换群作为一个整体结构的关键。
(后续练习将遵循类似的格式进行解答)